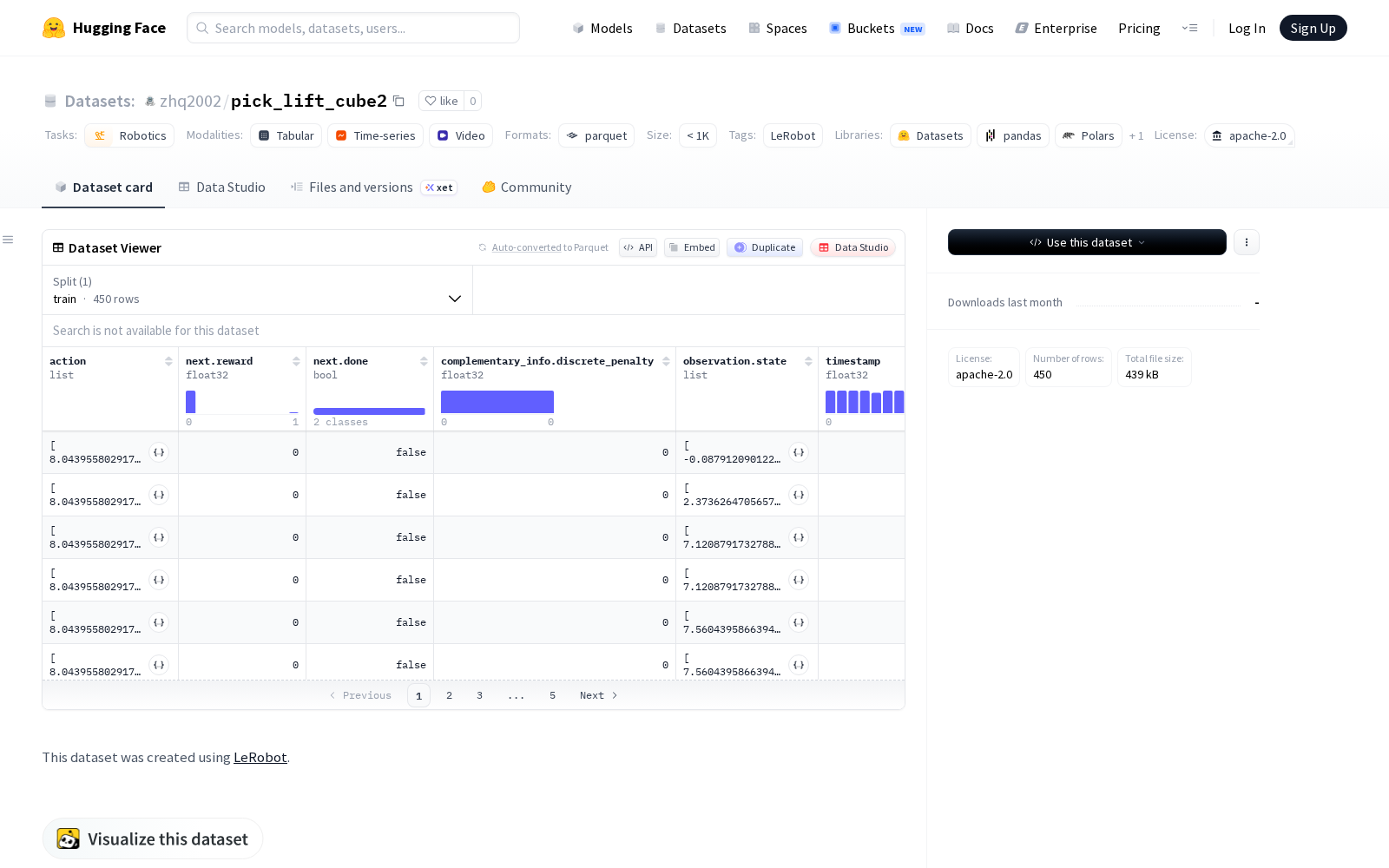
zhq2002本次发布的数据集pick_lift_cube2,该数据集是一个机器人学数据集,使用LeRobot工具创建,专注于模拟或记录机器人执行任务(如拾取和举起立方体)的过程。数据集包含动作、奖励、完成标志、观测(包括顶部摄像头图像和机器人状态)等字段,以10帧每秒的速率记录。总共有5个episodes、450帧数据,涉及一个任务。数据以parquet格式存储,并包含视频文件,适用于机器人控制、强化学习等研究。
Dataset card内容:
Files and versions内容:
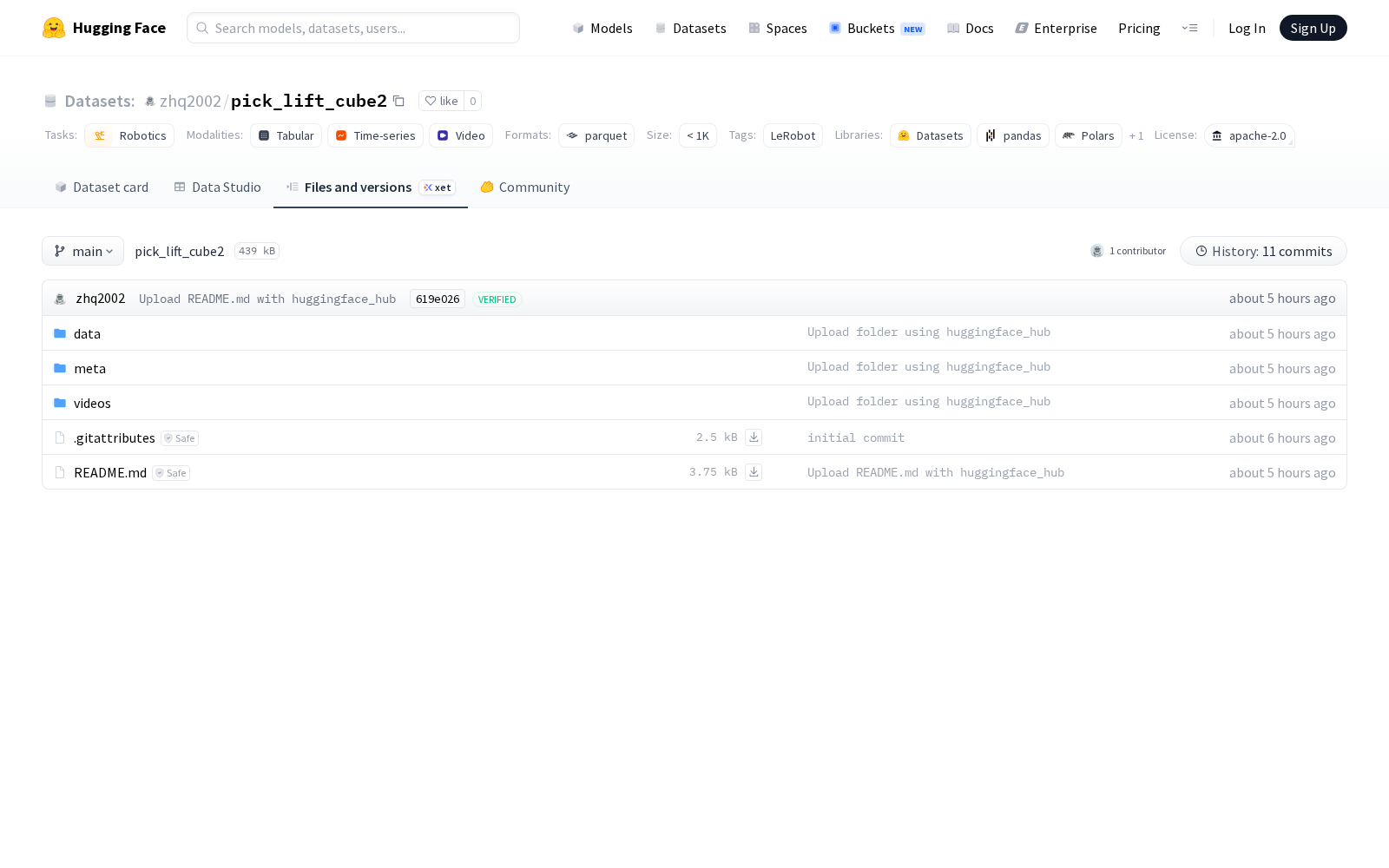


zhq2002本次发布的数据集pick_lift_cube2,该数据集是一个机器人学数据集,使用LeRobot工具创建,专注于模拟或记录机器人执行任务(如拾取和举起立方体)的过程。数据集包含动作、奖励、完成标志、观测(包括顶部摄像头图像和机器人状态)等字段,以10帧每秒的速率记录。总共有5个episodes、450帧数据,涉及一个任务。数据以parquet格式存储,并包含视频文件,适用于机器人控制、强化学习等研究。


面向社区/商业的数据集话题

面向高校/科研机构的开源数据集话题
_1769672084863.jpg)