

随着服务机器人在餐饮、零售等线下场景的落地节奏加快,面向细分操作场景的高质量训练数据集,正在成为制约机器人操控精度、视觉识别准确率提升的核心瓶颈。作为人工智能和机器人产业的核心生产资料,垂直场景的结构化标注数据集可以大幅降低研发团队的原始数据采集成本,加快模型迭代效率,此前咖啡制备等精细操作场景的双臂机器人专用公开数据集一直处于供给不足的状态。
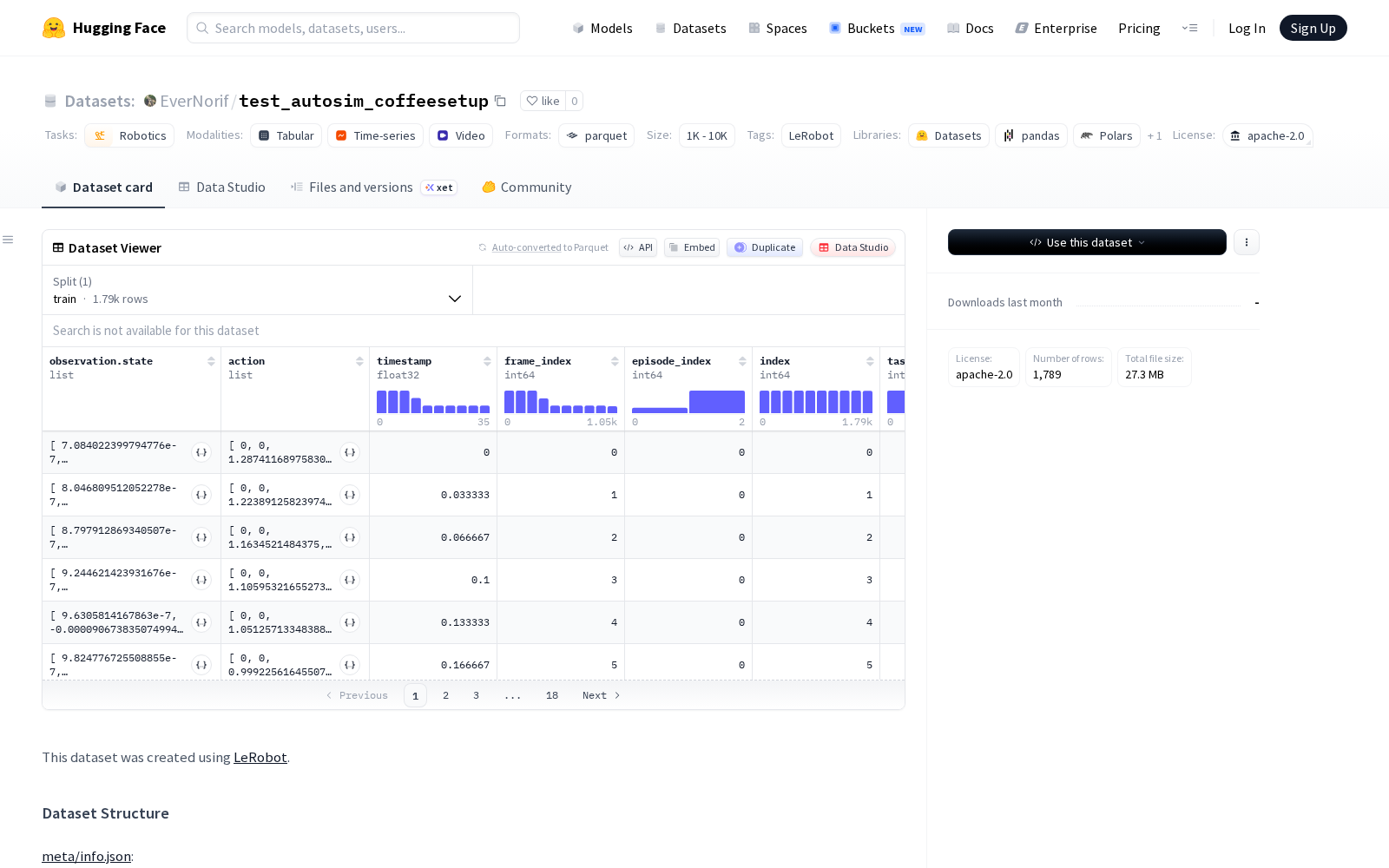
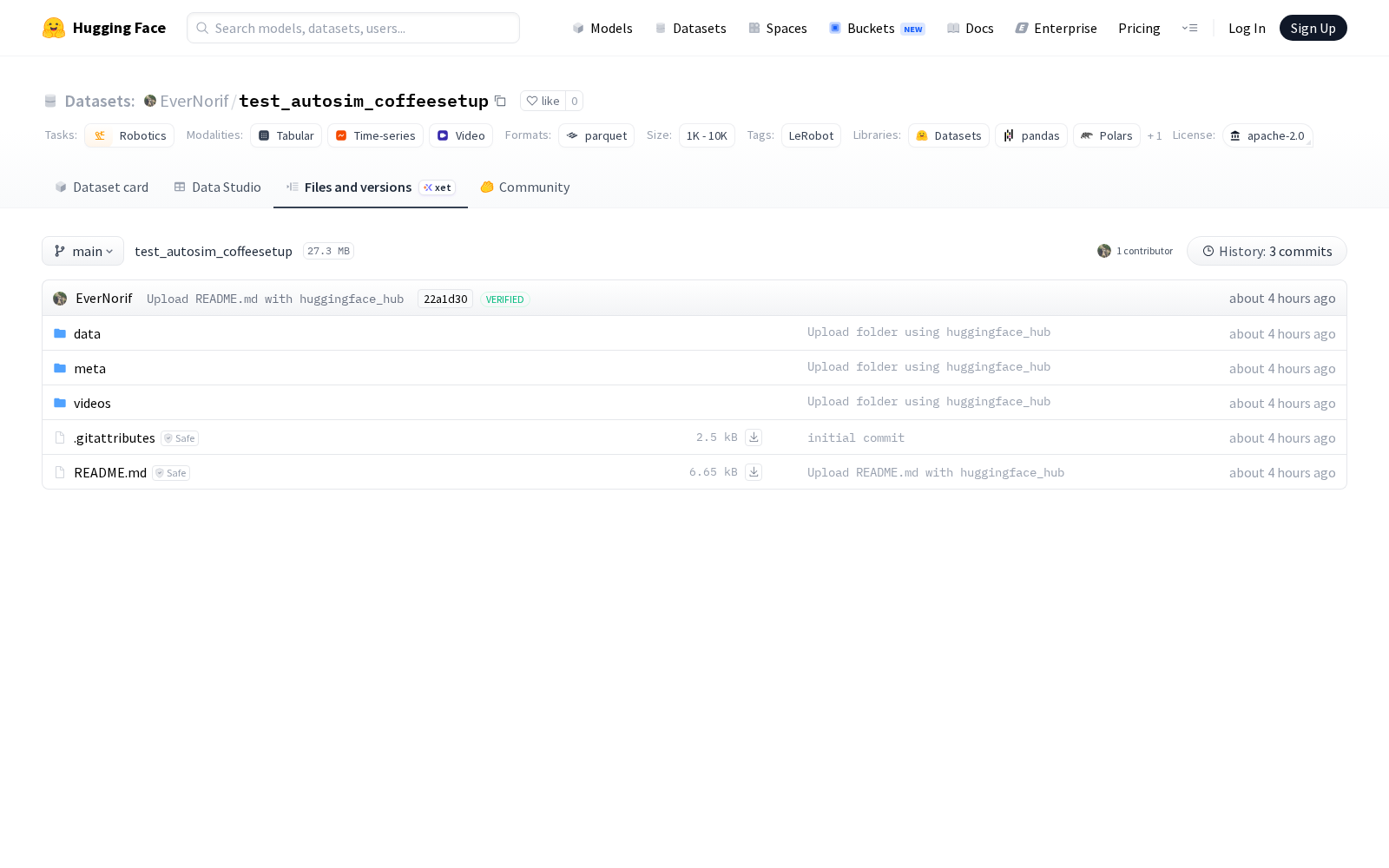
近日,机器人技术服务商EverNorif正式在全球知名AI开源社区HuggingFace首发test_autosim_coffeesetup专用数据集,填补了咖啡场景双臂机器人操作训练的细分数据空白。据公开信息显示,该数据集基于LeRobot框架创建,专为X7S-Abs双臂机器人设计,完整覆盖咖啡制备全流程的操作任务,共包含3个完整的操作情节(episodes),累计1789帧采样数据,采样帧率为30fps,整体以parquet结构化文件+mp4视频文件的格式存储,适配主流机器人学习框架的直接调用。
从数据集公开的特征维度来看,其不仅包含前视、左手摄像头、右手摄像头三个视角的480x480分辨率RGB视频数据,完整复刻了双臂机器人执行操作时的全链路视觉输入信息,可直接用于机器人视觉定位、操作对象识别、动态避障等方向的算法训练;同时还包含25维浮点数组格式的观察状态数据,覆盖机器人基座、身体、肩部、肘部、手腕、夹持器的全关节实时状态,以及21维浮点数组格式的动作控制数据,对应机器人基座、身体、左右臂、夹持器的全维度控制指令,再搭配时间戳、帧索引、情节索引等元数据,形成了「视觉输入-状态反馈-动作输出」的完整闭环训练数据结构,可直接支撑模仿学习、强化学习等主流机器人学习范式的训练需求。
该数据集遵循Apache 2.0开源许可,无论是学术研究机构还是商业化研发团队,均可免费使用、修改甚至二次分发。从潜在应用方向来看,该数据集除了可直接用于双臂机器人咖啡操作能力的训练外,还可拓展至类似的餐饮场景精细操作、多臂协同控制、动态场景视觉伺服等研究领域,为服务机器人的场景化落地提供数据底座支撑。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)