

近年,具身智能、工业服务机器人赛道进入快速发展期,机器人操作控制、视觉伺服等核心技术的迭代高度依赖真实环境采集的多模态标注数据,而实机采集数据成本高、标注维度不全等问题,长期制约着相关领域的科研与落地效率。作为AI训练的核心生产要素,垂直场景的高质量开源机器人数据集,已成为行业公认的核心基础设施。近期,开发者Alexander Roempke正式发布的eval_pi05_newgripper_80k_01数据集,正是针对这一行业需求推出的专用机器人数据集。
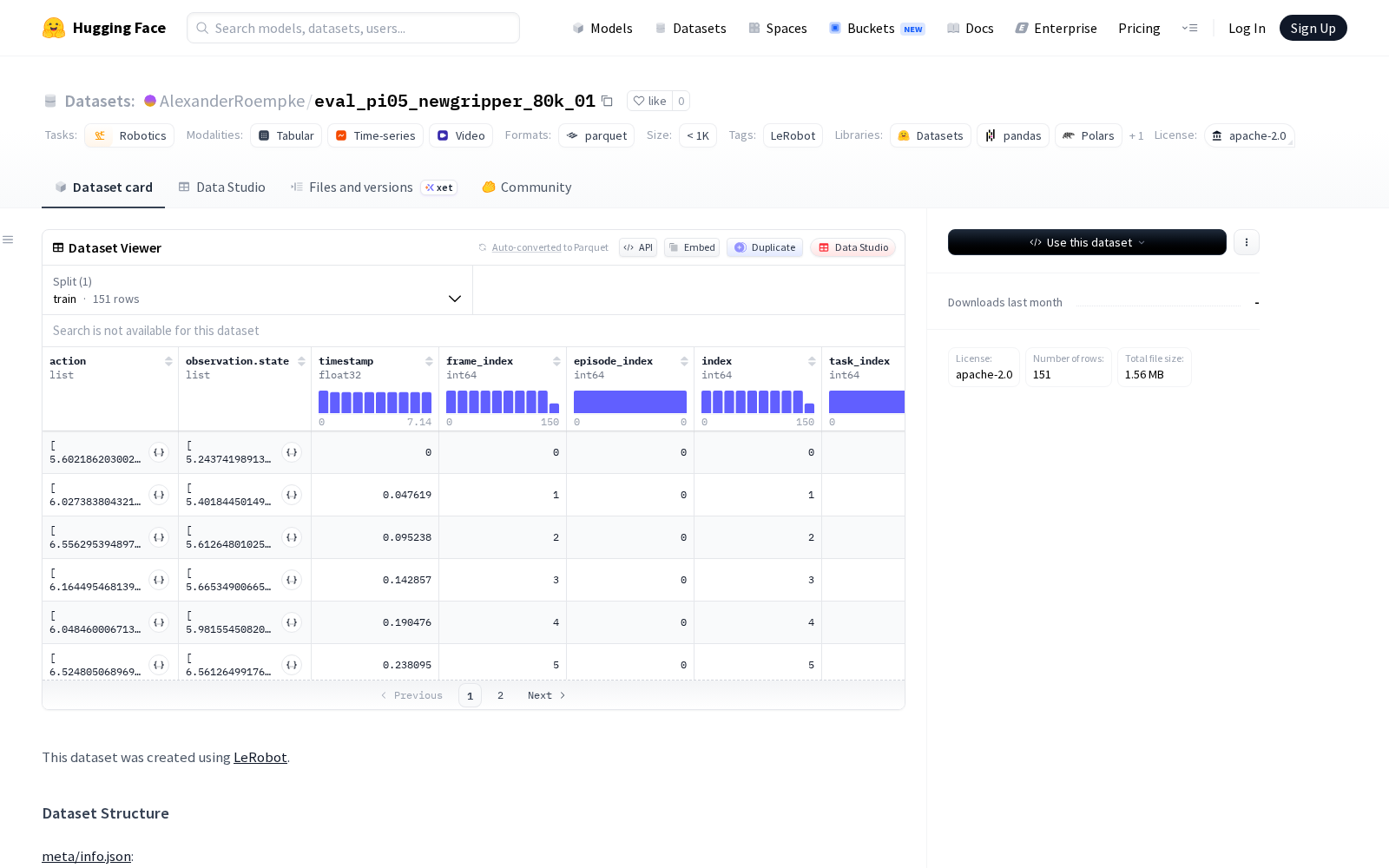
据介绍,该数据集由机器人开源项目LeRobot打造,全部数据基于ned2型科研机器人实机采集,包含1个完整任务episode、共151帧时序数据,结构化数据采用parquet格式存储,配套视频采用mp4格式封装,采集帧率为21fps,全量数据总大小300MB,其中结构化数据100MB、视频数据200MB,小体量的特性方便科研人员快速下载、快速开展算法验证工作。
从数据标注维度来看,eval_pi05_newgripper_80k_01覆盖四大类核心特征:其一为7维动作浮点数组,精准记录从基座到手臂、手臂到肘部等全关节的实时位置数据;其二为观察状态数据,维度与动作数据完全对应,可直接用于强化学习、模仿学习场景下的状态匹配训练;其三为双摄像头同步采集的视觉数据,两个机位(camera1、camera2)的图像分辨率均为480x640、3通道RGB格式,可支持多视角视觉伺服、手眼标定等相关算法的训练验证;其四为全套时序元数据,包含时间戳、帧索引、episode索引、任务索引等字段,方便研究人员快速完成时序对齐、片段截取等数据预处理操作。
从应用价值来看,该数据集可广泛适配多个机器人学习方向的研发需求:可用于机器人操作控制算法的快速验证,小体量高精度的实采数据可帮助研发人员快速调试关节控制模型的精度,减少全量数据集测试的时间成本;可服务于视觉伺服学习领域的算法研发,双视角同步的视觉+关节数据可支撑基于视觉反馈的机器人姿态调整、目标抓取等场景的模型训练;也可作为多模态机器人学习模型的小样本泛化能力验证集,检验模型在未知任务下的迁移效果。随着数据要素在人工智能领域的核心价值不断凸显,这类垂直场景的高质量开源数据集,正在成为推动细分领域技术突破的重要公共资源。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)