

当前全球工业机械臂、通用服务机器人智能化迭代进入加速期,高质量、结构化的垂直领域训练数据集已成为制约机器人学习算法落地的核心瓶颈之一。作为机器人学习领域的重要研究成果,RLP-ETH本次发布的eval_RobotLearning_v2数据集,是依托LeRobot框架打造的专用机器人学习数据集,专门针对so_follower类型机器人的训练需求设计,面向全球研究人员开放获取。
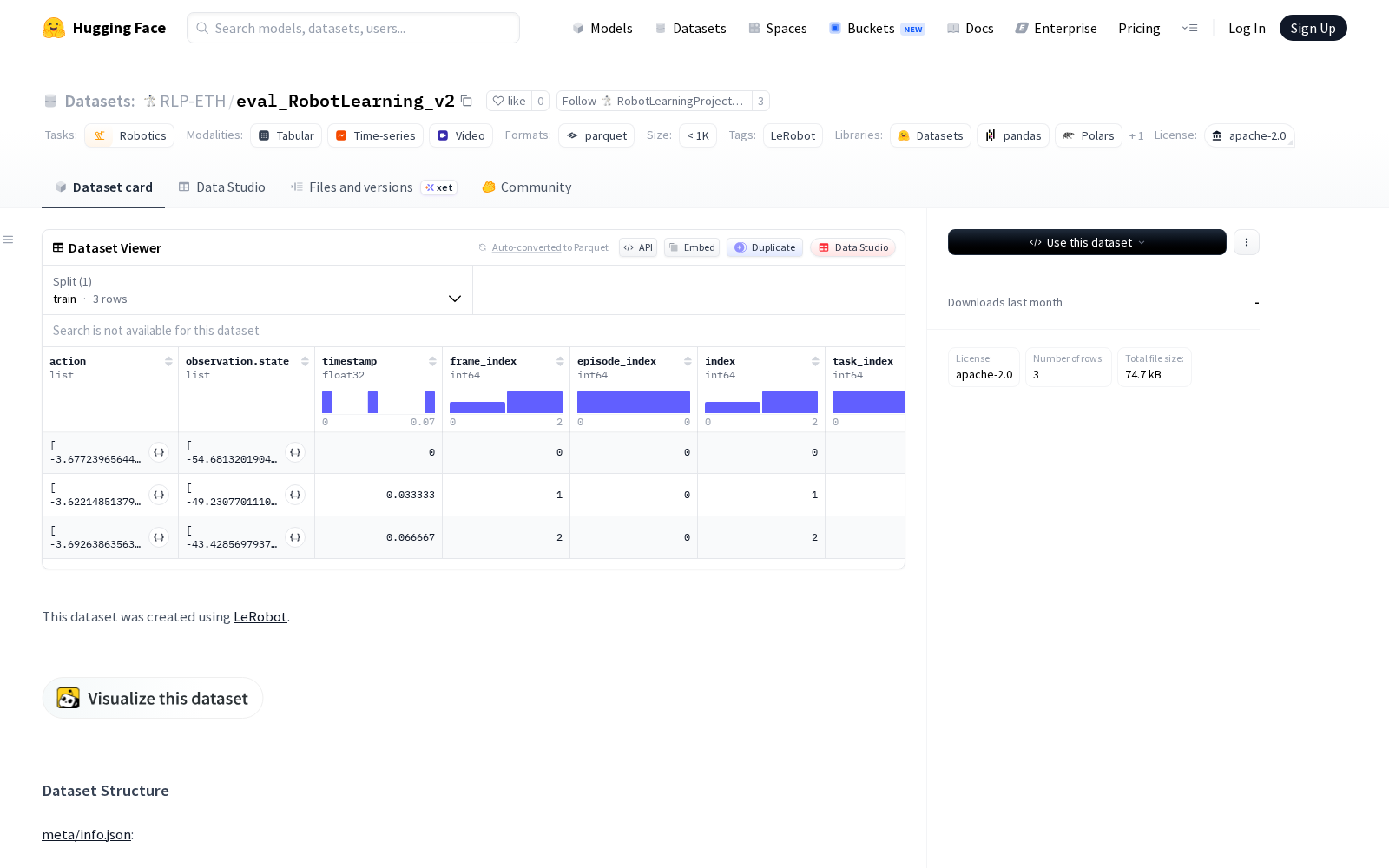
该数据集采用标准化存储方案,核心结构化数据以parquet文件格式存储,配套视觉数据以mp4格式存储,整体由多个数据序列(episodes)组成,每个序列包含按时间步排列的多维度采集信息。从数据特征来看,其核心字段包含两大核心维度:一是6维浮点数组格式的动作(action)与观测状态(observation.state)数据,分别对应机器人肩部平移、肩部提升、肘部弯曲、腕部弯曲、腕部旋转和夹爪位置六大关节的实时参数,可直接用于机器人运动控制模型的训练与验证;二是分辨率为480x640、3通道的前视图像观测(observation.images.front)视频数据,可支撑视觉伺服相关的计算机视觉任务研发。除此之外,数据集还配套了时间戳、帧索引、episode索引、任务索引等完整元数据,方便研究人员按需筛选、调用数据子集,降低数据预处理成本。
从存储配置来看,该数据集采用分块存储架构,每块数据容量为1000帧,当前结构化数据文件总大小为100MB,配套视频文件总大小为200MB,采集帧率为30fps,可满足多数轻量化模型的训练、验证需求。值得注意的是,当前版本数据集的meta/info.json文件中显示总episodes、总帧数和总任务数均为0,或代表该版本为初步开放版本,后续将逐步完成数据填充与版本迭代。
从应用场景来看,该数据集可广泛适配机器人控制策略研发、强化学习算法验证、计算机视觉(尤其是视觉伺服方向)任务研究等多个领域:在工业场景中,可支撑精密装配、物料分拣等场景的机械臂控制算法训练,大幅降低实体机器人试错成本;在服务机器人领域,可用于物品抓取、动态递送等动作的模型优化;同时也可作为基准数据集,用于不同机器人学习算法的效果横向对比。该数据集的发布,也进一步丰富了全球机器人学习领域的公共数据源供给,对降低相关研究门槛、推动机器人智能化技术落地具有积极意义。
Dataset card内容:
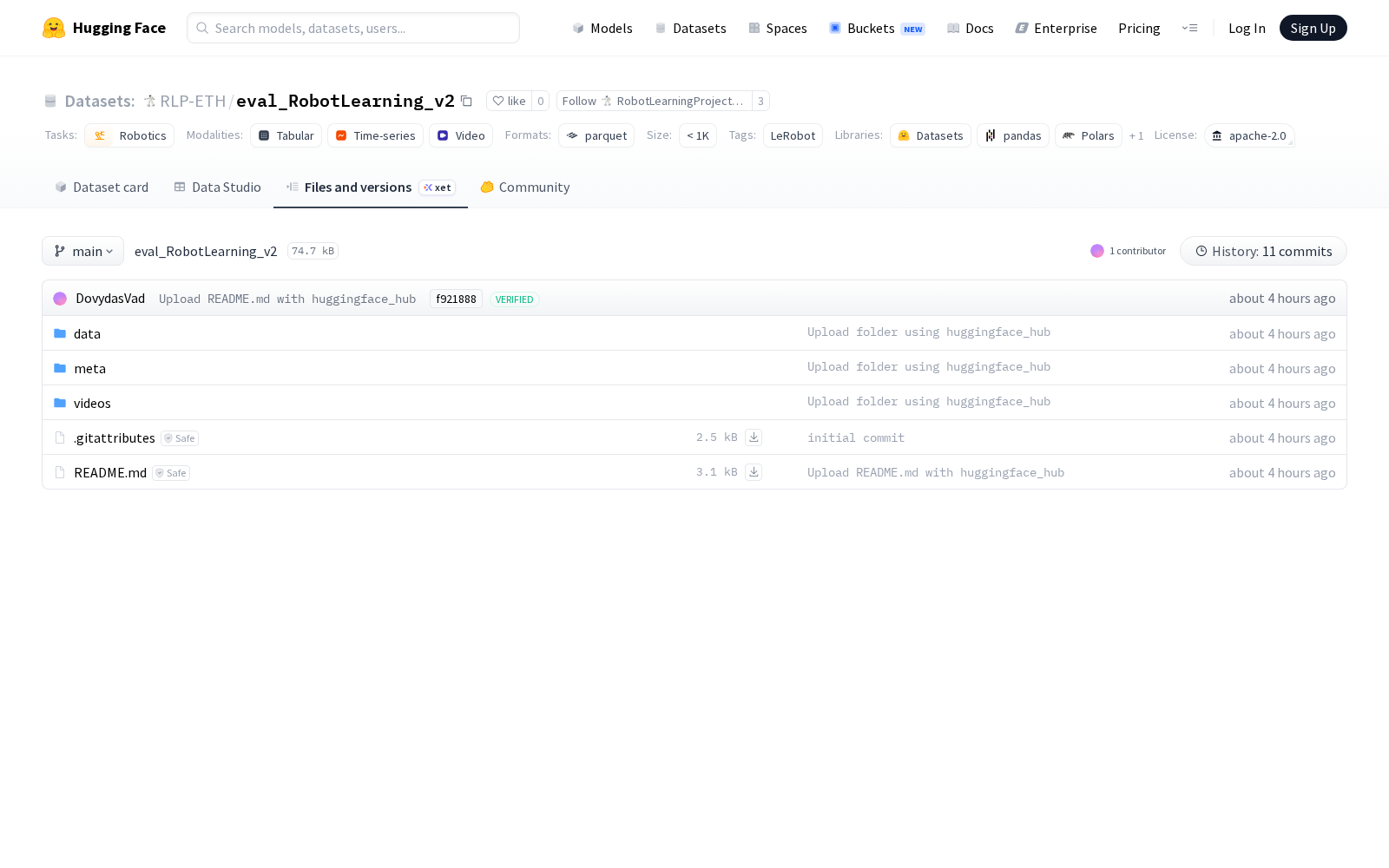
Files and versions内容:



_1769672084863.jpg)