

近年通用AI技术加速向实体场景落地,机器人成为AI商业化的核心赛道之一。不同于大语言模型领域丰富的公开文本语料,机器人学习所需的多模态动作、任务序列数据集采集成本高、格式标准分散,长期制约着行业研发效率。2023年HuggingFace推出的LeRobot开源框架及配套数据集规范,目前已成为全球机器人学习领域应用最广泛的标准化格式之一,通过统一数据存储、标注、调用规则,打通了不同硬件平台、研发团队之间的数据流通壁垒,大幅降低了数据预处理的研发成本。
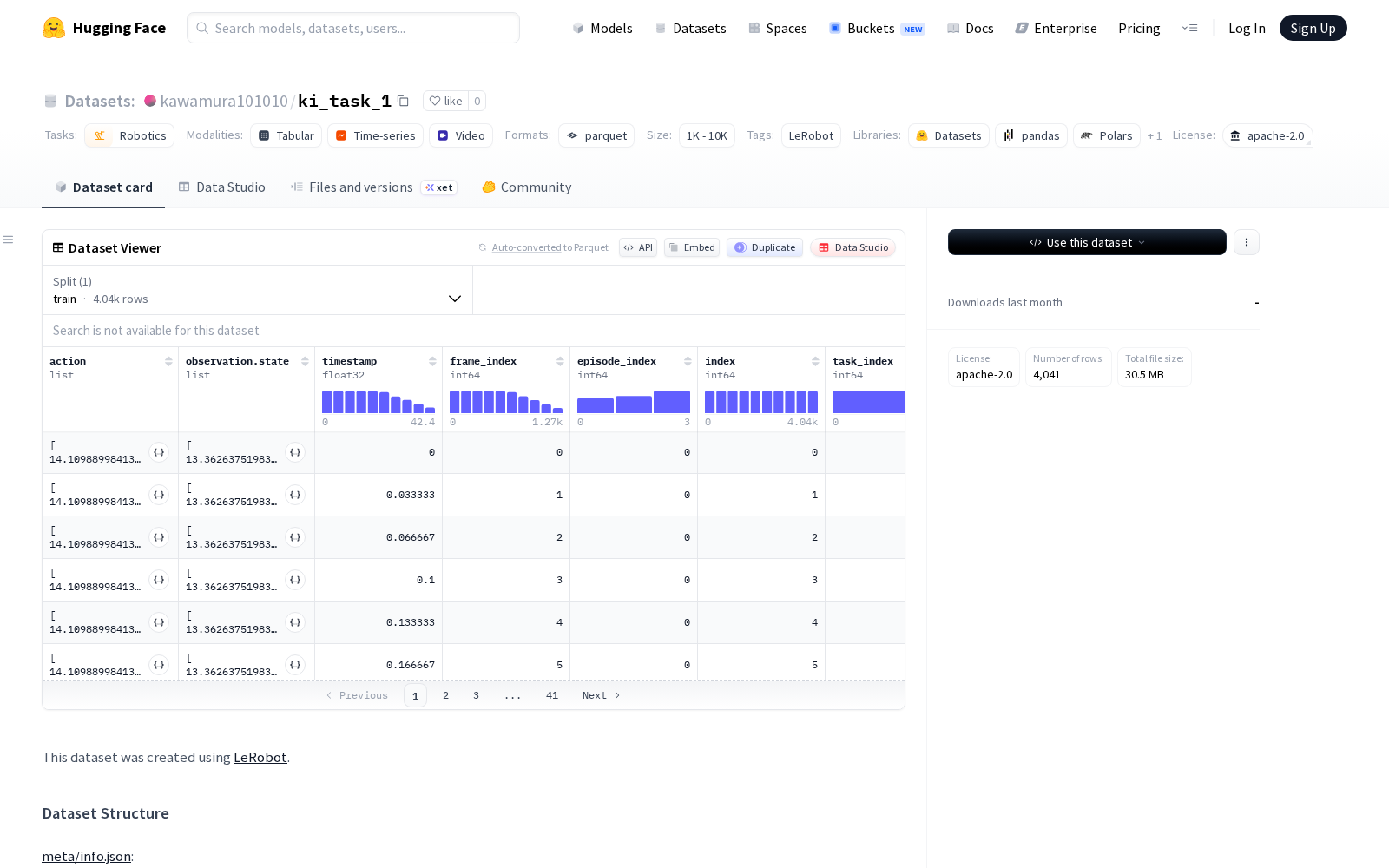
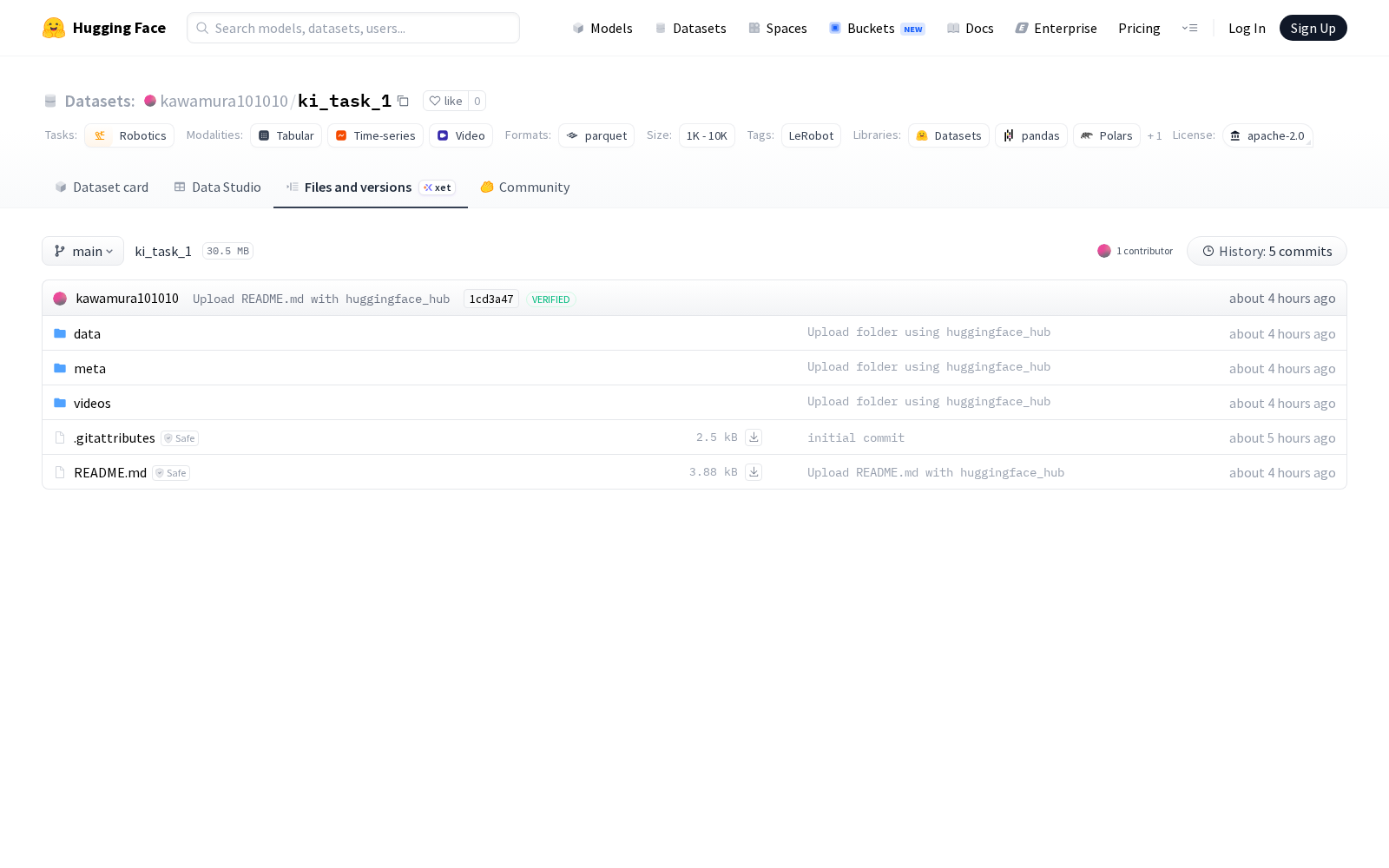
kawamura101010本次发布的数据集ki_task_1,该数据集为HuggingFace LeRobot格式机器人数据集。
Dataset card内容:
Files and versions内容:
从应用价值来看,ki_task_1作为标准化的机器人任务类数据集,可广泛适配多个机器人研发场景的训练需求:一是可支撑家用、商用服务机器人的日常作业任务学习,覆盖清扫、物品递送、空间整理等高频服务场景的逻辑训练;二是可应用于工业机械臂的柔性作业控制算法研发,帮助机械臂适配多品类工件的抓取、组装、检测等差异化生产任务的迭代;三是可为人形机器人的动作序列规划提供数据支撑,助力复杂场景下的步态调整、上肢作业、人机交互等功能的研发;四是可用于多机器人协同系统的调度算法训练,优化多机作业的任务分配、路径规划、冲突避让等核心逻辑。
当前全球数据要素市场正持续向垂直AI场景深耕,机器人领域的高质量训练数据已经成为制约实体AI落地的核心瓶颈之一。ki_task_1这类适配通用生态标准的公开数据集的发布,不仅能够降低中小研发团队的技术准入门槛,也为跨团队的算法效果比对、技术协作提供了统一的基准数据集,对推动全球机器人学习技术的普惠化发展、加速通用机器人技术的商业化落地具有重要的支撑作用。



_1769672084863.jpg)