

当前,人形机器人、家用服务机器人、工业协作机器人的商业化落地正进入关键阶段,而非结构化场景下的精细操作能力,是制约机器人适配复杂日常、生产场景的核心瓶颈。其中,细分场景下的高质量标注演示数据集,是训练机器人操作技能、验证相关算法的核心基础资源,也是当前机器人AI研发领域的稀缺供给,标准化的场景数据集能够大幅降低研发团队的数据采集成本,统一算法验证基准,加快技术落地迭代效率。
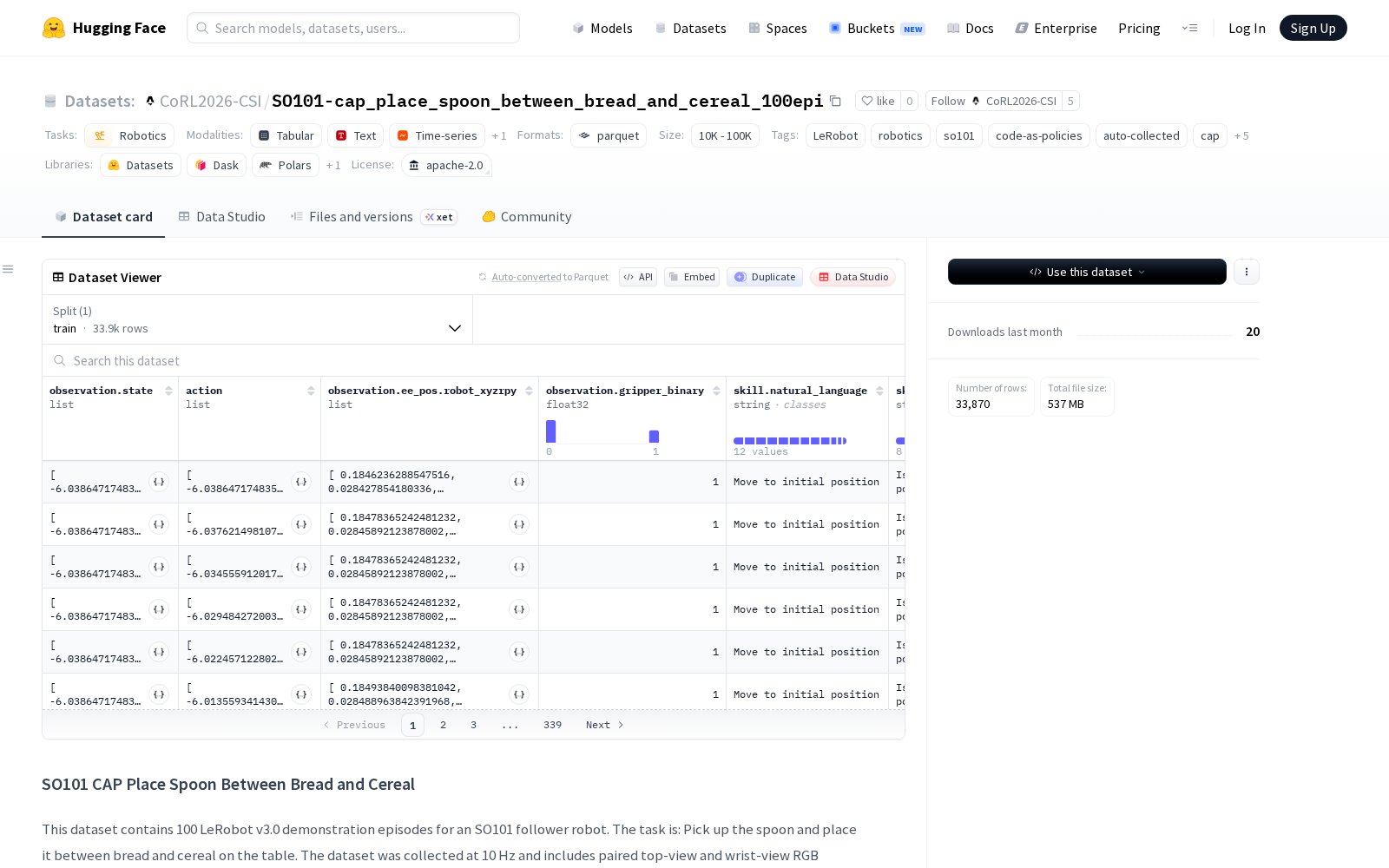
CoRL2026-CSI本次发布的数据集SO101-cap_place_spoon_between_bread_and_cereal_100epi,该数据集包含100个LeRobot v3.0演示片段,用于SO101跟随机器人。任务是:拿起勺子并将其放在桌子上的面包和谷物之间。数据集以10赫兹的频率收集,包括配对的上视图和手腕视图RGB视频、机器人状态/动作轨迹以及CAP技能注释。
作为针对桌面摆放场景的专项训练数据集,本次发布的数据集在标注维度、采集视角上的设置,能够充分覆盖机器人操作训练的核心需求:多视角RGB视频可用于计算机视觉算法的环境感知、操作对象识别训练,机器人状态与动作轨迹数据可直接用于模仿学习、强化学习模型的动作序列拟合,CAP技能注释则为操作技能的拆解、迁移学习提供了标准化标签,避免不同研发团队自定义标注带来的算法适配成本。
从落地应用来看,该类数据集的典型应用方向覆盖多个机器人研发领域:家用服务机器人可基于该数据集训练餐桌场景下的餐具摆放、物品整理能力,工业协作机器人可参考其标注逻辑开发小件物料分拣、工位定置摆放技能,相关算法研发团队也可将其作为标准化基准,验证机器人操作技能的泛化性、精准度,推动机器人从“定点重复作业”向“自主判断柔性操作”升级,进一步拓展机器人在餐饮服务、家庭陪护、轻工业生产等场景的落地可能性。
查看SO101-cap_place_spoon_between_bread_and_cereal_100epi
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)