

近年来,人形机器人、工业协作机器人赛道进入高速发展期,机器人通用控制算法、模仿学习模型的训练需求持续攀升,但不同于大语言模型领域有充足的公开文本数据储备,机器人领域同时覆盖关节动作参数、视觉观测数据、时序对齐标注的高质量专用训练数据一直是行业稀缺资源,直接限制了中小团队的算法研发效率与落地进度。近日,科技开发者jjr1007正式对外发布机器人技术数据集may7_first16_last48_newMethod_test_part1,该数据集于2026年5月12日首发于HuggingFace平台,使用LeRobot工具创建,是专门面向机器人控制、模仿学习方向的轻量化训练数据集。
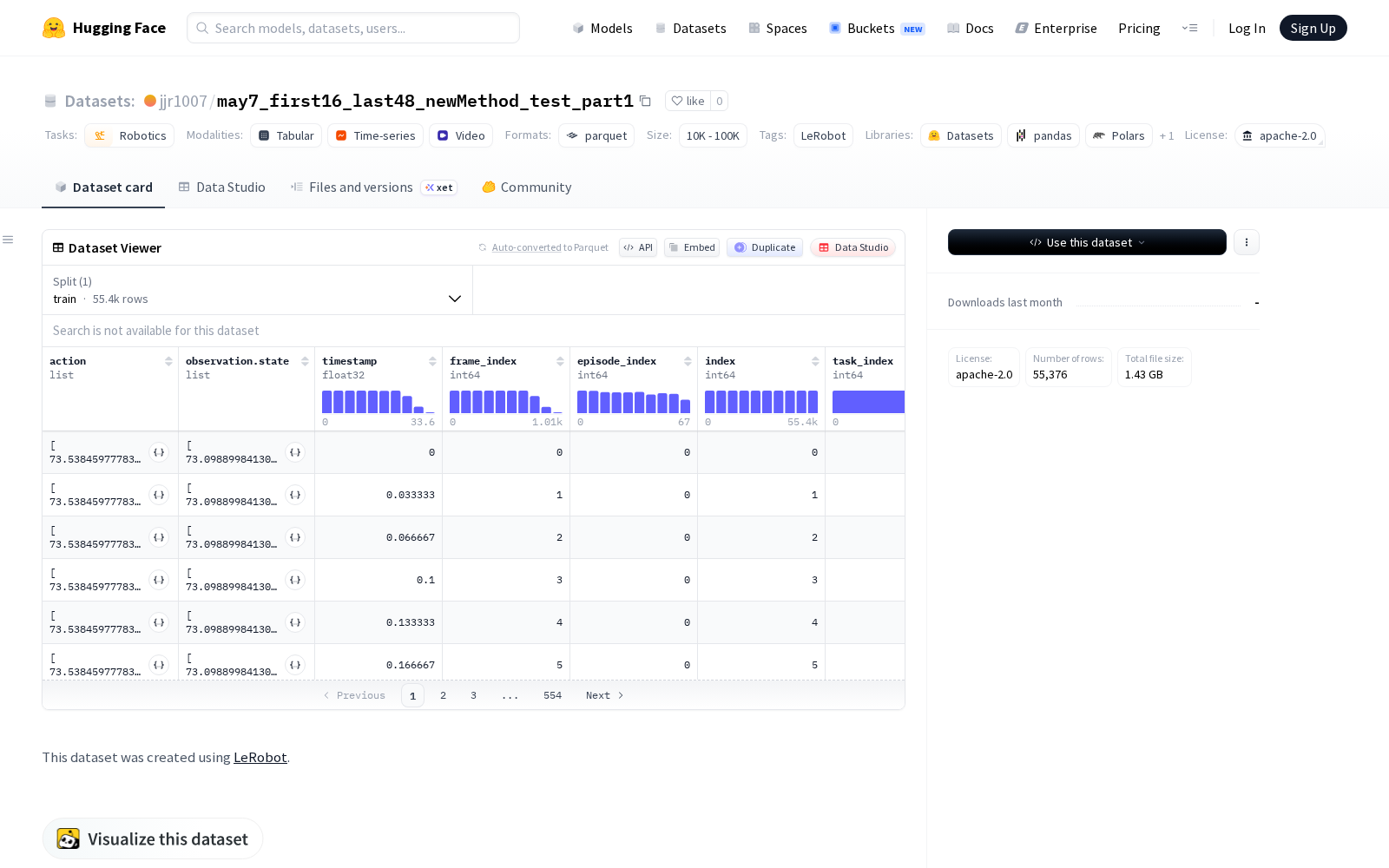
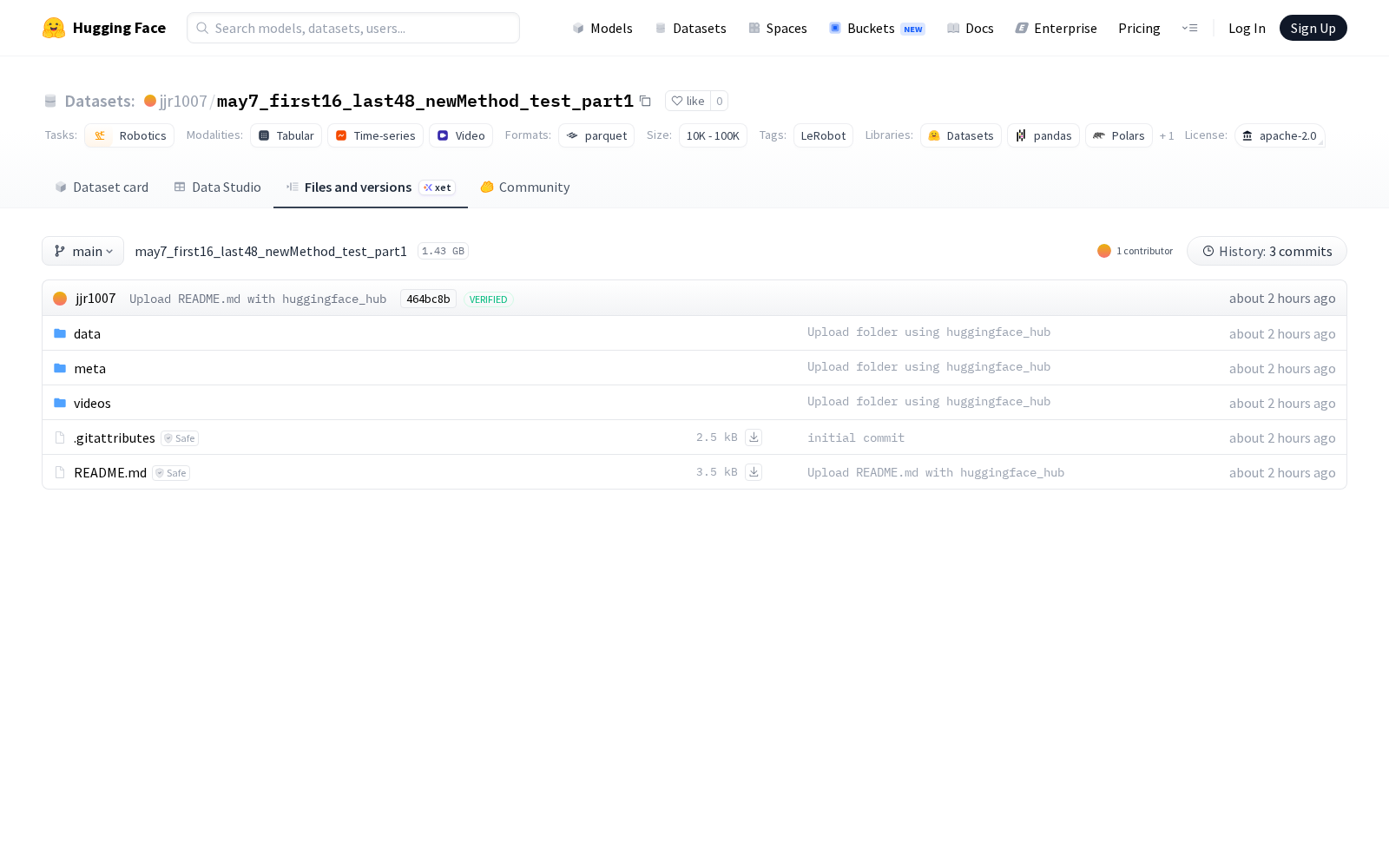
该数据集共包含68个episodes,总计55376帧有效数据,核心内容以parquet文件格式存储,并配套对应视频文件,总大小约200MB,整体采用chunked方式组织,便于开发者高效访问和批量处理。数据集的标注特征覆盖三类核心维度:一是动作维度,包含肩部平移、肩部提升、肘部弯曲、手腕弯曲、手腕旋转、夹爪位置共6个关节位置参数;二是观测状态维度,对应与动作参数完全对齐的关节位置反馈数据,可直接用于动作-反馈闭环模型训练;三是视觉维度,配套分辨率1080x1920的RGB通道前视摄像头图像,采样帧率为30fps,同时配套时间戳、帧索引、episode索引等标准化元数据,实现了动作、观测、视觉三类数据的精准时序对齐。
从应用方向来看,该数据集适用于机器人控制、模仿学习或强化学习任务,尤其适配so_follower类型的机器人研发需求。典型应用场景包括:一是工业协作机器人关节控制算法训练,可依托标注完成的动作-观测对齐数据,训练小样本模仿学习模型,降低实机调试的时间与硬件成本,覆盖分拣、装配、搬运等工业操作场景;二是视觉模仿学习模型训练,依托时序对齐的视频与关节参数,可训练机器人通过视觉输入自主复刻演示动作,覆盖服务机器人物品递送、餐饮机器人摆盘、人形机器人上肢动作模拟等民用场景;三是作为强化学习算法的基准测试数据集,验证不同控制策略的泛化性与稳定性。
作为机器人领域的轻量化专用训练数据集,本次发布的数据集填补了小样本机器人模仿学习场景的标准化数据供给缺口,其规范的标注结构、轻量化的体积降低了中小研发团队的使用门槛,对推动机器人控制算法的普惠化迭代、完善数据要素市场的垂直领域数据供给体系均有积极意义。
查看may7_first16_last48_newMethod_test_part1
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)