

随着自动驾驶、服务机器人、城市数字孪生、元宇宙空间建模等前沿领域的快速发展,多智能体协同SLAM(同时定位与地图构建)、密集场景重建技术的产业化需求持续攀升,而高质量基准数据集的缺失,一直是制约相关算法迭代、跨机构成果验证的核心痛点之一。近日,苏黎世联邦理工联合多机构共同研发的ReplicaMultiagent Plus基准数据集正式对外发布,该数据集于2026年5月11日首发于arXiv平台,专门面向多智能体协同SLAM、密集场景重建领域的算法评估需求打造。
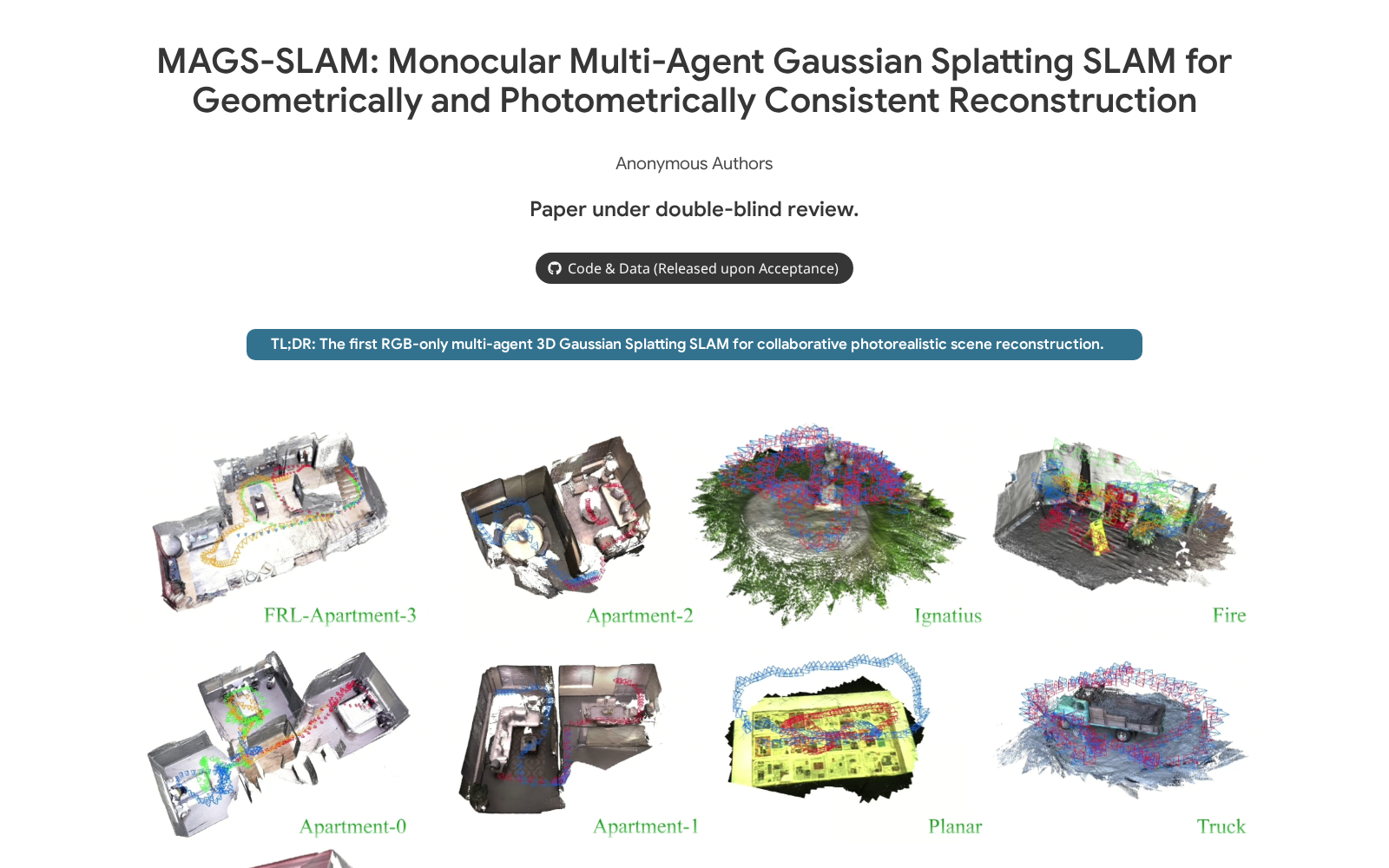
作为专门用于评估协同高斯SLAM性能的基准数据集,ReplicaMultiagent Plus相比过往同类产品实现了多项核心能力升级:其序列规模首次扩展至包含4个智能体的长轨迹序列,同时配套提供了高精度的地面真实几何结构与全场景语义标注,可全面支持单目、RGB-D及语义多智能体SLAM的密集重建效果评估。为了兼顾算法验证的通用性与落地适配性,本次数据集同时覆盖合成场景与真实物理场景双采集渠道,针对性解决了现有多智能体数据集中普遍存在的智能体数量有限、轨迹较短的行业共性问题,能够为协作式场景重建算法的几何一致性、光度一致性与语义理解能力提供全维度的标准化验证平台。
从应用场景来看,该数据集的落地有望为多个前沿数字赛道的技术迭代提供支撑:在公共服务机器人领域,研发团队可基于该数据集完成复杂公共空间下多机器人协同导航、联合空间建模的算法验证,提升商场、医院、园区等场景的多机服务效率;在高等级自动驾驶领域,可用于车路协同、多车联合感知的场景重建算法测试,为多源感知融合能力的验证提供统一参考标尺;在城市数字孪生领域,可支持大规模实体空间快速三维重建算法的优化,降低城市全域数字孪生建模的研发成本;在应急救援场景中,多无人机、多地面机器人协同搜救的场景建模算法也可依托该数据集完成前期仿真验证,提升灾害场景下的空间感知响应速度。
当前全球技术类数据要素市场正处于快速扩容阶段,高质量的训练与验证数据集是人工智能、空间感知等前沿技术研发的核心基础资源。本次ReplicaMultiagent Plus数据集的发布,不仅填补了多智能体协同SLAM领域的基准数据集空白,也为全球相关领域的研究者提供了统一的算法评估标准,有效降低跨机构研发的成果验证成本,加速多智能体协同感知、密集场景重建技术的产业化落地进程,为数字经济核心赛道的技术成熟提供基础支撑。
详情页内容:



_1769672084863.jpg)