

随着具身智能成为人工智能领域的核心赛道,机器人操作算法的训练对高质量实采数据集的需求持续攀升。相较于仿真数据集,真实硬件采集的多模态数据能够更好地模拟现实环境中的干扰因素,提升算法的泛化能力,但由于硬件成本高、采集流程复杂,面向入门教学场景的标准化机器人数据集始终处于供给不足的状态。
2026年5月15日,开发者marcossantosperesvw正式发布rubikscube机器人学数据集,并首发上线HuggingFace平台,为具身智能领域的教学实训、算法研发提供了新的基础数据支撑。据介绍,该数据集是使用LeRobot创建的机器人学专项数据集,核心定位为教学专用资源,围绕魔方操作单任务完成全流程数据采集。
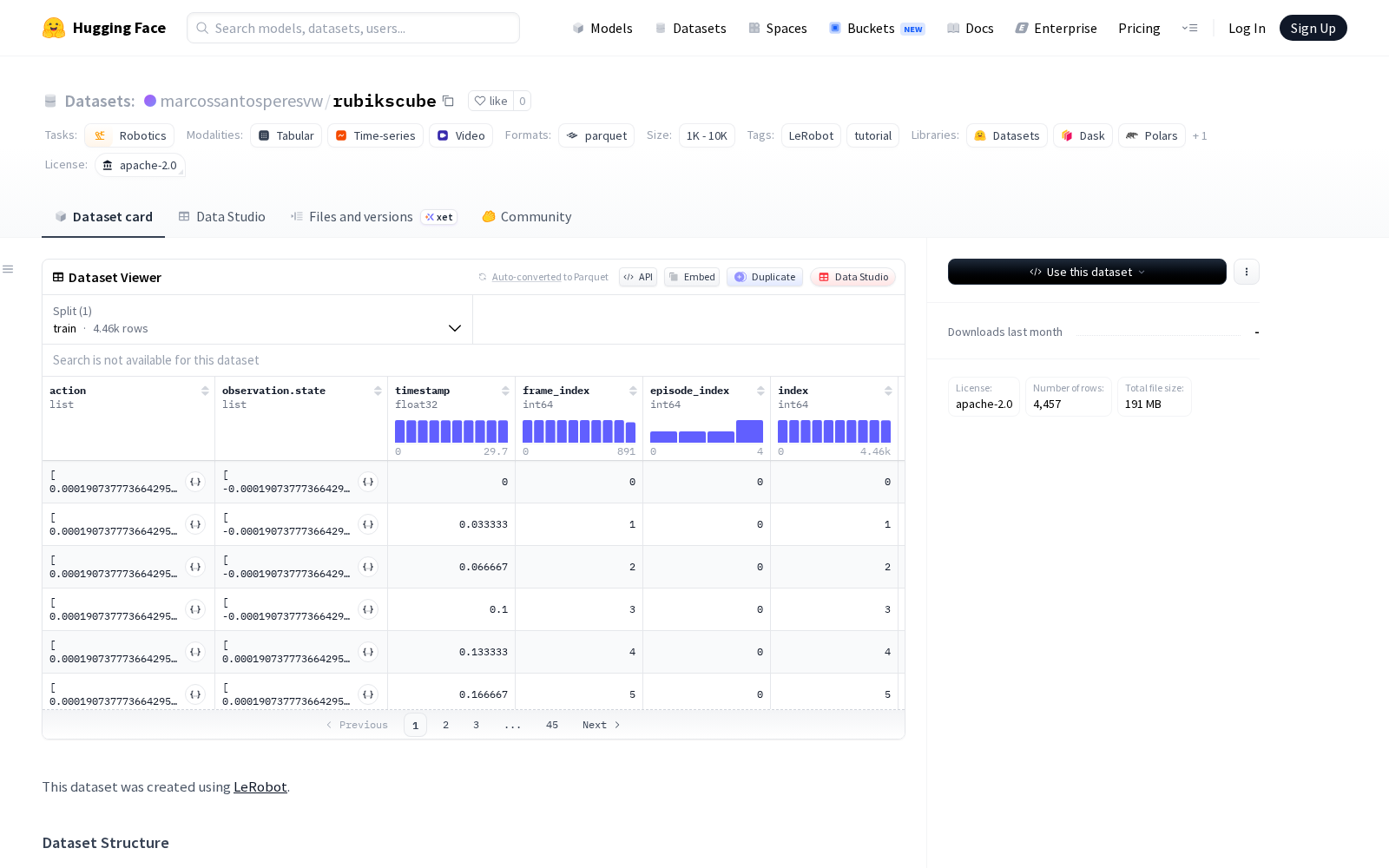
公开信息显示,rubikscube数据集包含5个训练集,总帧数达4457,所有数据均基于Trossen AI固定式机器人采集,仅覆盖1项核心任务以保障数据标注的准确性与场景的一致性。数据采用Parquet格式存储,该格式为AI训练场景下的主流列式存储格式,支持高并发快速读取,可大幅降低训练时的数据预处理成本。数据集维度覆盖机器人操作全链路需求:包含14维浮点数组格式的动作数据,对应左右机械臂关节控制参数;14维浮点数组格式的观测状态数据,对应机械臂实时关节位置;同时搭载来自四个不同视角摄像头的视频观测数据,包括全局高分辨率、全局低分辨率、左右手腕摄像头四个采集源,视频参数为分辨率480x640、帧率30fps,采用高压缩比的AV1编码,在保障画质的同时降低存储成本。除此之外,数据集还配套完整的时间戳、帧索引等元数据,结构规范清晰,可直接适配主流机器人控制与强化学习训练框架。
从应用价值来看,该数据集首先可直接支撑魔方求解领域的算法研发:研究人员可基于多视角视觉数据训练魔方色块识别模型,结合机械臂动作与状态数据优化拧动路径规划算法,提升机器人魔方求解的速度与成功率。其次,数据集采集的机械臂小物体操作能力可迁移至更多通用机器人操作场景,包括工业产线的小型零部件分拣、家政服务机器人的物品整理、精密操作场景的姿态调整等,为相关算法训练提供基础数据支撑。同时,由于该数据集专为教程设计,场景单一、数据结构规范、标注完整,非常适合作为具身智能入门教学的实训数据集,高校、AI培训机构的研发人员无需搭建复杂的硬件采集环境,即可快速开展机器人控制算法的训练与验证,大幅降低具身智能的研发与教学门槛。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)