

当前,全球机器人产业正处于智能化升级的关键阶段,AI驱动的自主操作、视觉伺服控制技术已成为协作机器人、工业机器人突破复杂场景作业能力的核心技术方向。不同于仿真环境生成的训练数据,实体机器人真实运行的多维度标注数据集,是解决算法从仿真到现实迁移偏差(Sim2Real Gap)、提升模型落地适配性的核心生产要素,长期以来存在供给量少、场景覆盖窄、标注维度不全等行业痛点,极大制约了机器人智能化技术的迭代效率。近日,cupnb正式对外发布ur10e_real_cube_all机器人学专业数据集,该数据集依托LeRobot框架生成,于2026年5月15日首发上线HuggingFace,专为机器人控制与学习任务的研发需求打造。
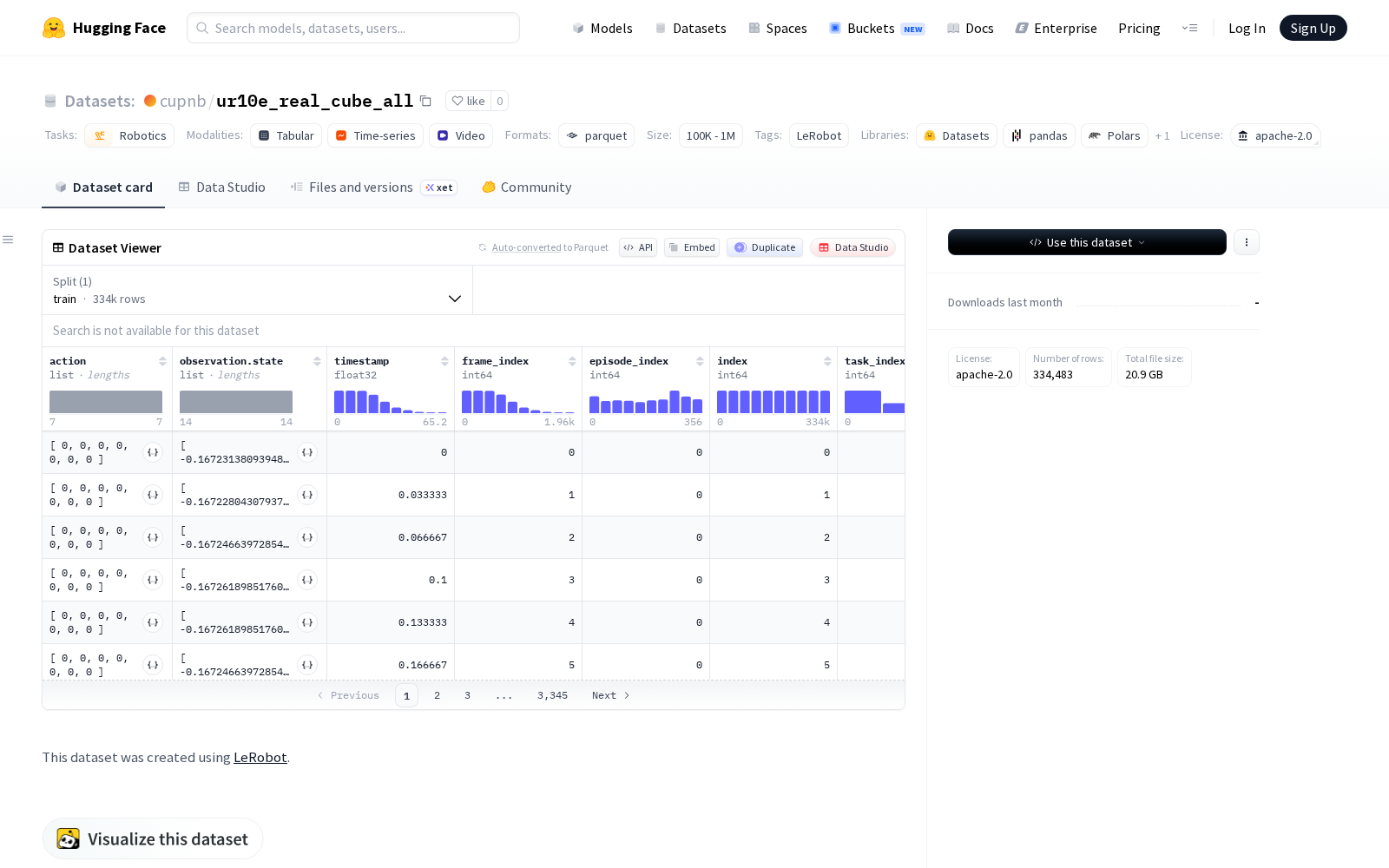
cupnb本次发布的ur10e_real_cube_all数据集,是通过LeRobot创建的专业机器人学数据集,可用于各类机器人控制和学习任务的训练与验证。该数据集共包含357个采样episodes,总计334477帧有效数据,覆盖4个不同的机器人操作任务;数据结构化内容以parquet文件格式存储,配套视频数据以mp4格式存储。数据集的标注维度覆盖多类核心训练需求:特征包括7维动作向量(涵盖线性和角速度以及夹爪位置)、14维观测状态(涵盖关节位置和姿态)、三个摄像头的同步视频观测(摄像头1分辨率为1280x720,摄像头2和3分辨率为720x1280,均为30fps彩色视频),同时配套时间戳、帧索引、集索引、任务索引等完整元数据。本次数据采集所用的机器人类型为ros2,数据集采用Apache 2.0开源许可证,支持商业场景使用。
从潜在应用价值来看,该数据集可覆盖多个机器人研发领域的核心需求:一是可用于工业协作机器人的操作学习算法训练,为精密装配、柔性分拣、动态码垛等典型工业场景的机器人动作规划、力控适配等技术研发提供真实场景数据支撑;二是可支撑视觉伺服控制技术的迭代优化,多视角同步的视频数据与机器人实时状态数据的联动标注,可帮助研发团队优化视觉引导下的机器人动态响应精度、降低空间定位误差;三是可作为多模态机器人感知算法的标准化验证基准,同步的动作、状态、视觉数据能够为机器人多传感器融合算法的效果验证提供统一的测试依据。本次数据集的发布,进一步丰富了全球实体机器人训练数据集的供给,为机器人智能化研发降低了数据获取门槛,也为数据要素在智能制造、机器人产业的落地应用提供了典型的公共数据供给样本。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)