

近年来,人形机器人、工业协作机器人的商业化落地进程持续加速,精细操作能力已经成为机器人适配复杂场景的核心竞争力,而高质量、标准化的场景交互数据集,是训练机器人操作算法、提升模型泛化能力的核心生产资料。为解决不同来源机器人数据集适配成本高、复用效率低的行业痛点,HuggingFace推出的LeRobot格式已成为全球机器人学习领域的主流通用数据规范,大幅降低了研发团队的数据预处理成本。
vibeyvibey本次发布的数据集duct_tape_to_hand_dataset_v1,该数据集为HuggingFace LeRobot格式机器人数据集,于2026年5月16日率先在HuggingFace平台上线,是当前市场上为数不多的聚焦柔性物体操作交互场景的专项训练数据集。
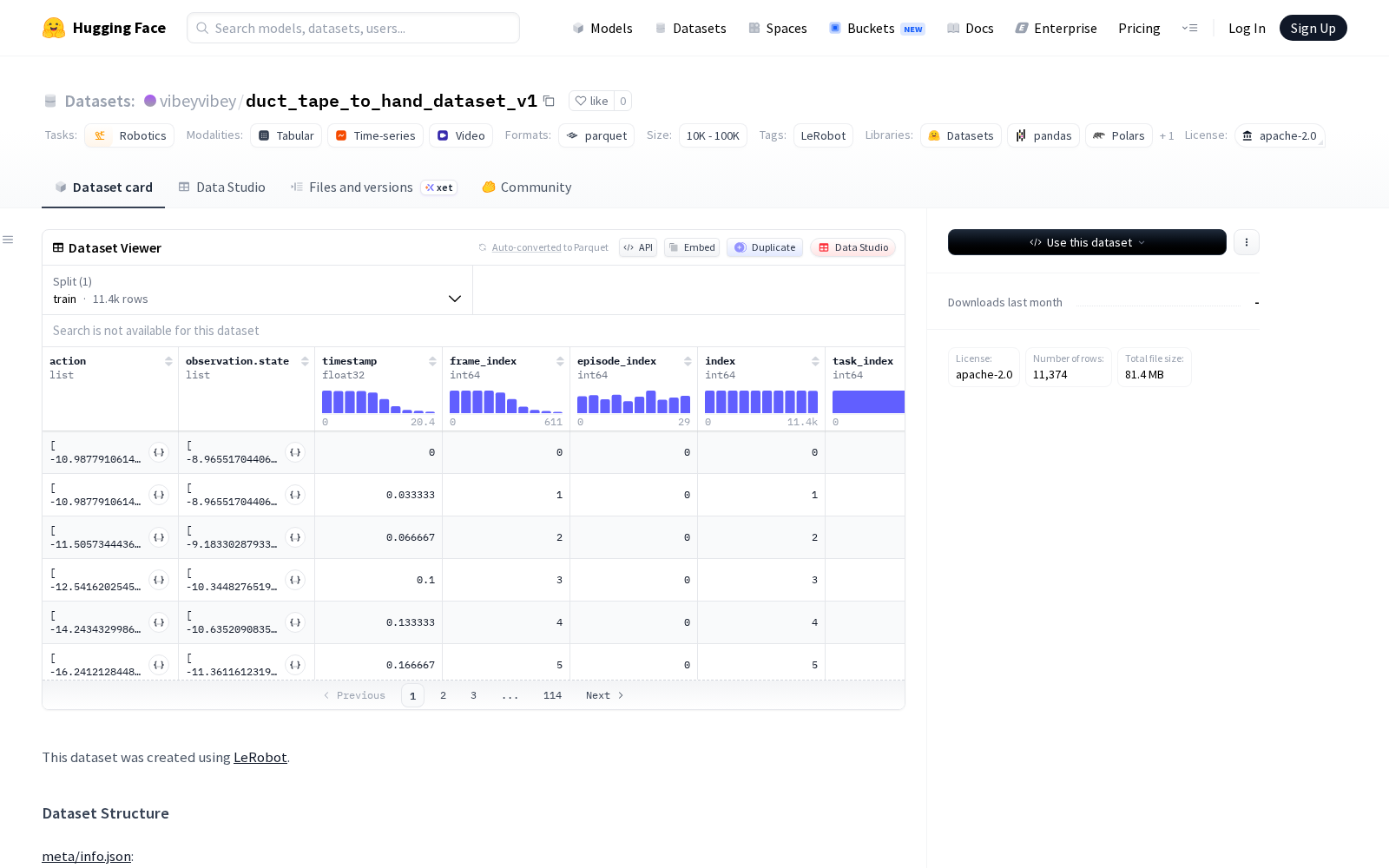
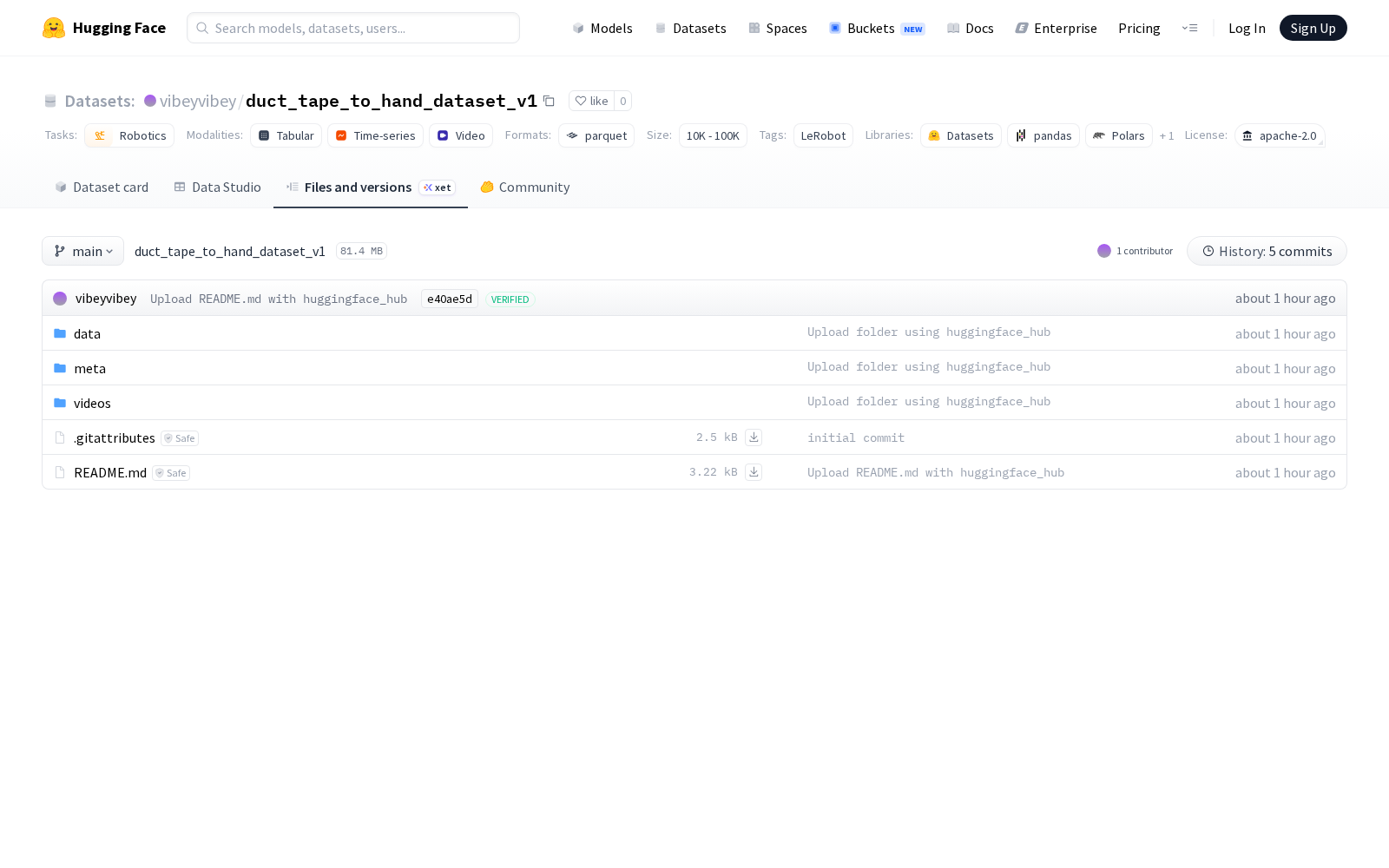
查看duct_tape_to_hand_dataset_v1
Dataset card内容:
Files and versions内容:
从公开的数据集信息来看,该数据集聚焦“胶带粘贴”这一典型的柔性物体与机械手/人手交互场景,数据结构完全符合LeRobot规范,可直接接入主流机器人学习训练框架,无需额外格式转换即可投入算法研发。
按照行业通用应用场景划分,该类数据集可支撑多领域研发需求:在工业制造场景,可用于训练工业协作机器人完成3C产品封装、零部件密封、线束固定等涉及胶带操作的自动化作业,提升产线机器人的操作精度与场景适配能力;在服务机器人场景,可支撑家庭服务机器人、养老助残机器人完成物品封装、简易维修等生活化操作训练,拓展服务机器人的功能边界;在数字孪生与仿真研发领域,可用于优化物理交互模拟算法,提升虚拟环境下机器人操作的碰撞检测精度、力反馈拟合效果,降低实体机器人的测试成本。
当前我国机器人产业正处于从“功能落地”向“智能升级”的关键阶段,细分场景的专项训练数据缺口已成为制约算法迭代速度的核心瓶颈之一。本次duct_tape_to_hand_dataset_v1数据集的发布,不仅补全了柔性物体操作领域的标准化数据供给,也为国内机器人数据集的通用化、标准化发展提供了参考样本,对推动机器人操作学习技术的落地应用、完善数据要素在智能机器人产业的供给体系具有积极意义。



_1769672084863.jpg)