

当前,具身智能产业进入快速落地期,工业协作机器人作为智能制造与柔性生产的核心载体,其智能化迭代高度依赖场景化的真实操作训练数据。由于机器人数据采集成本高、标注难度大、格式标准不统一,高质量公开数据集长期是制约相关技术普惠发展的核心瓶颈。近日,KKLabUR3eLeRobot正式发布ur3e_lerobot_dataset_202605162208数据集,该产品于2026年5月16日首发上线HuggingFace,是面向机器人操作学习、工业协作机器人任务研发的专用数据集。
本次发布的数据集采用HuggingFace推出的LeRobot通用格式,该格式是当前全球机器人学习领域应用最广泛的开源数据标准之一,可直接适配绝大多数主流的机器人操作学习算法框架,无需研发人员进行复杂的格式转换与数据预处理工作,能够大幅降低算法训练的前期数据准备成本,提升研发效率。
作为针对UR3e轻量级协作机器人场景打造的数据集,ur3e_lerobot_dataset_202605162208可支撑多类典型应用场景的研发需求:在机器人操作学习领域,可用于模仿学习、强化学习、力控操作算法的训练与验证;在工业协作机器人落地场景中,可支撑精密装配、小件搬运、检测分拣、人机协同作业等任务的算法开发,帮助研发团队快速完成算法从仿真环境到真机场景的迁移验证,降低真机测试的安全风险与时间成本。
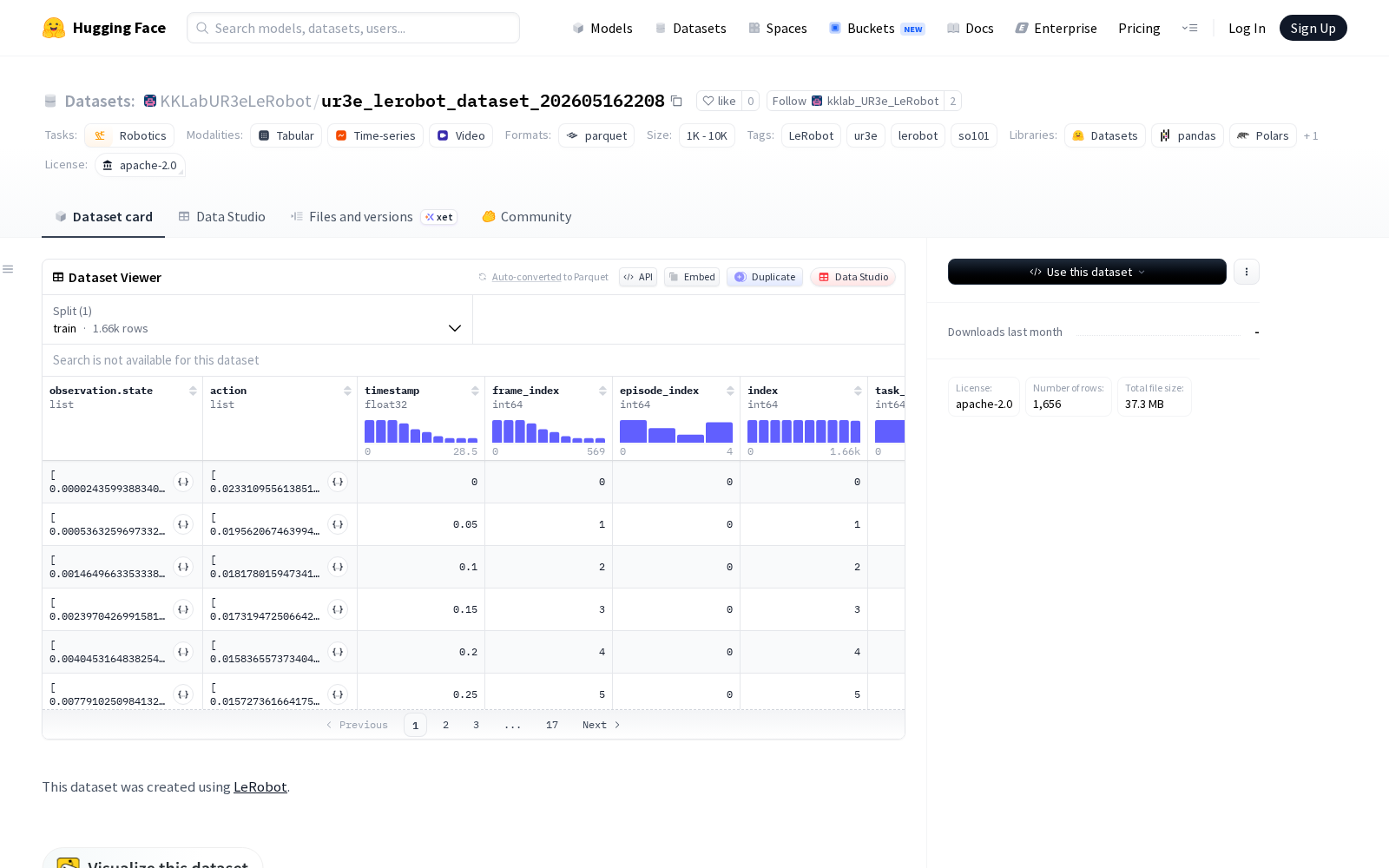
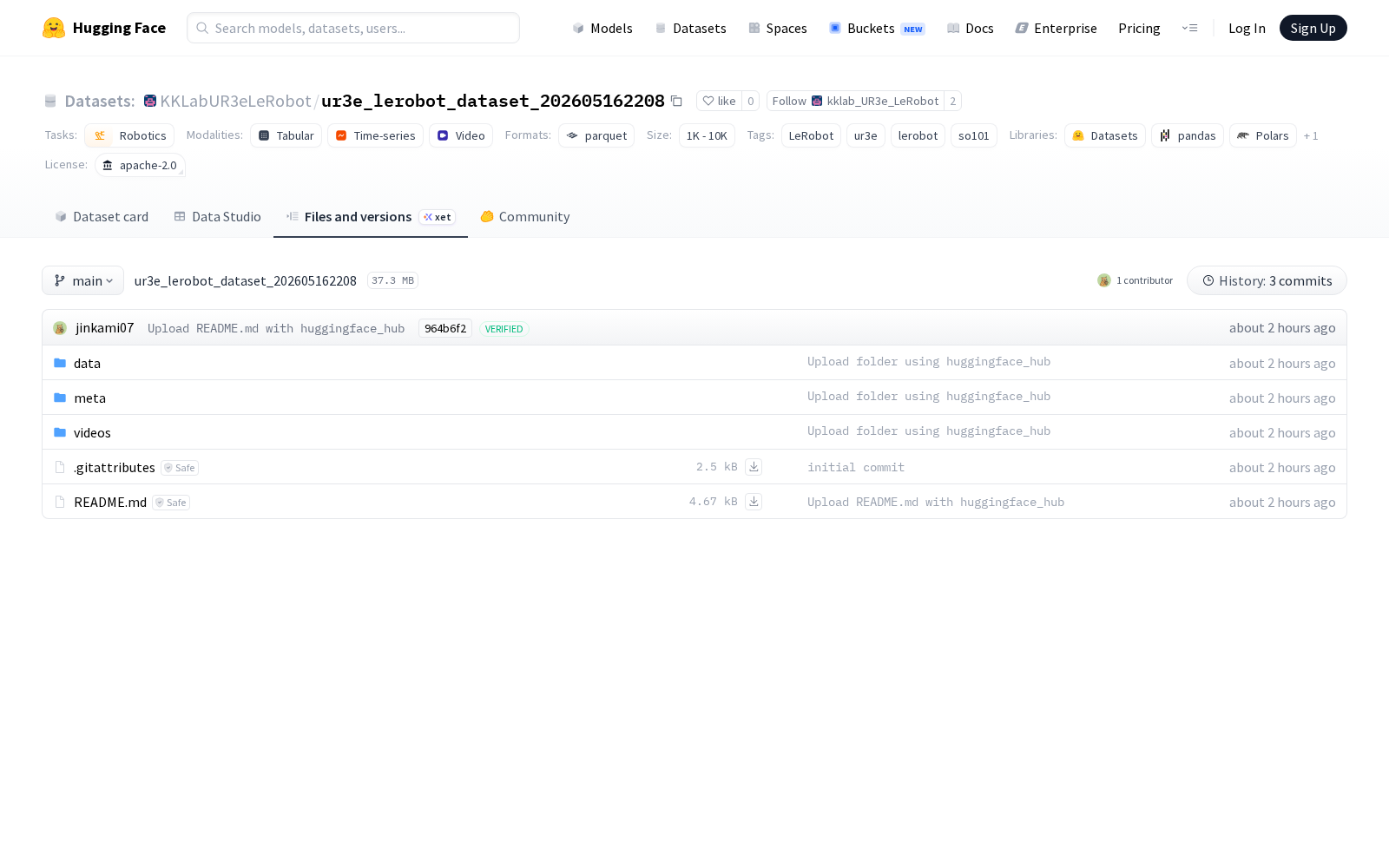
KKLabUR3eLeRobot本次发布的数据集ur3e_lerobot_dataset_202605162208,该数据集为HuggingFace LeRobot格式机器人数据集。想要了解数据集详细信息的用户可通过链接访问:查看ur3e_lerobot_dataset_202605162208
Dataset card内容:
Files and versions内容:
业内人士指出,开源开放的高质量场景数据集是人工智能领域核心的数据要素资源,本次KKLabUR3eLeRobot数据集的发布,进一步丰富了工业协作机器人领域的公开数据供给,对于推动机器人操作学习技术的普惠研发、加速工业智能制造的数字化升级具有积极的产业价值。



_1769672084863.jpg)