

随着工业机器人、服务机器人智能化进程加速,机械臂的自主抓取、视觉引导操作已成为机器人落地工业分拣、物流仓储、家政服务等场景的核心能力,而高标注质量、场景针对性强的实机操作数据集,是训练高泛化性机器人控制模型的核心基础。当前行业内多数机器人模型训练依赖仿真数据,在实机落地时往往存在泛化性不足、适配成本高的问题,细分场景的实机标注数据集缺口显著。近期,开发者Nick147258369正式对外发布了一款专门针对指定物体抓取投放场景的机器人操作数据集,为相关领域的算法研发提供了新的训练与评测资源。
本次发布的数据集命名为grab_red_cube_and_throw_into_blue_bucket_20260516_135841,于2026年5月16日首发于全球知名AI开源社区HuggingFace,基于HuggingFace推出的LeRobot开源机器人学习框架制作,该框架广泛应用于机器人操作数据的采集、标注与模型训练环节,在全球机器人研发群体中拥有较高的普及率,输出的数据集可适配多款主流机械臂的训练需求。
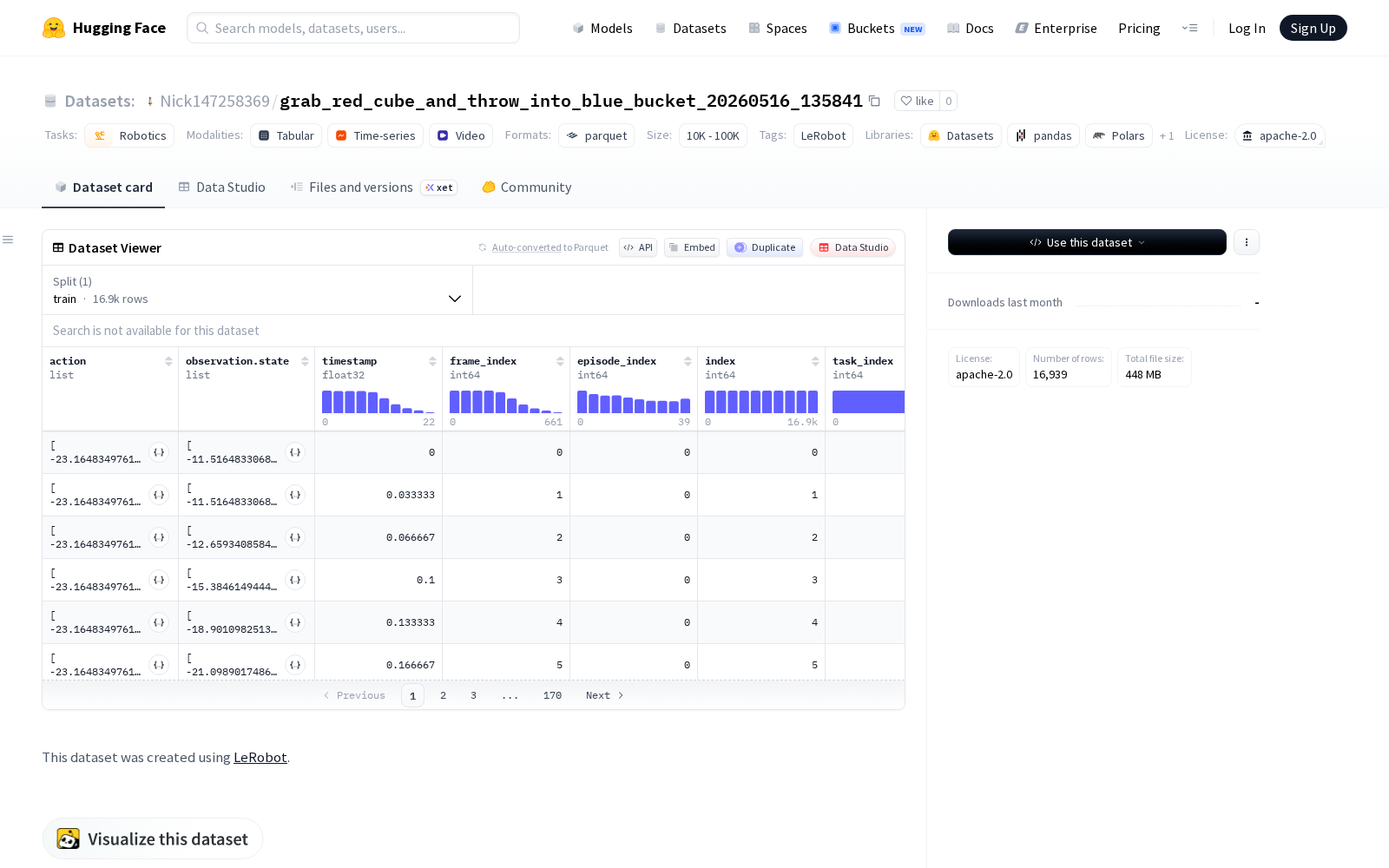
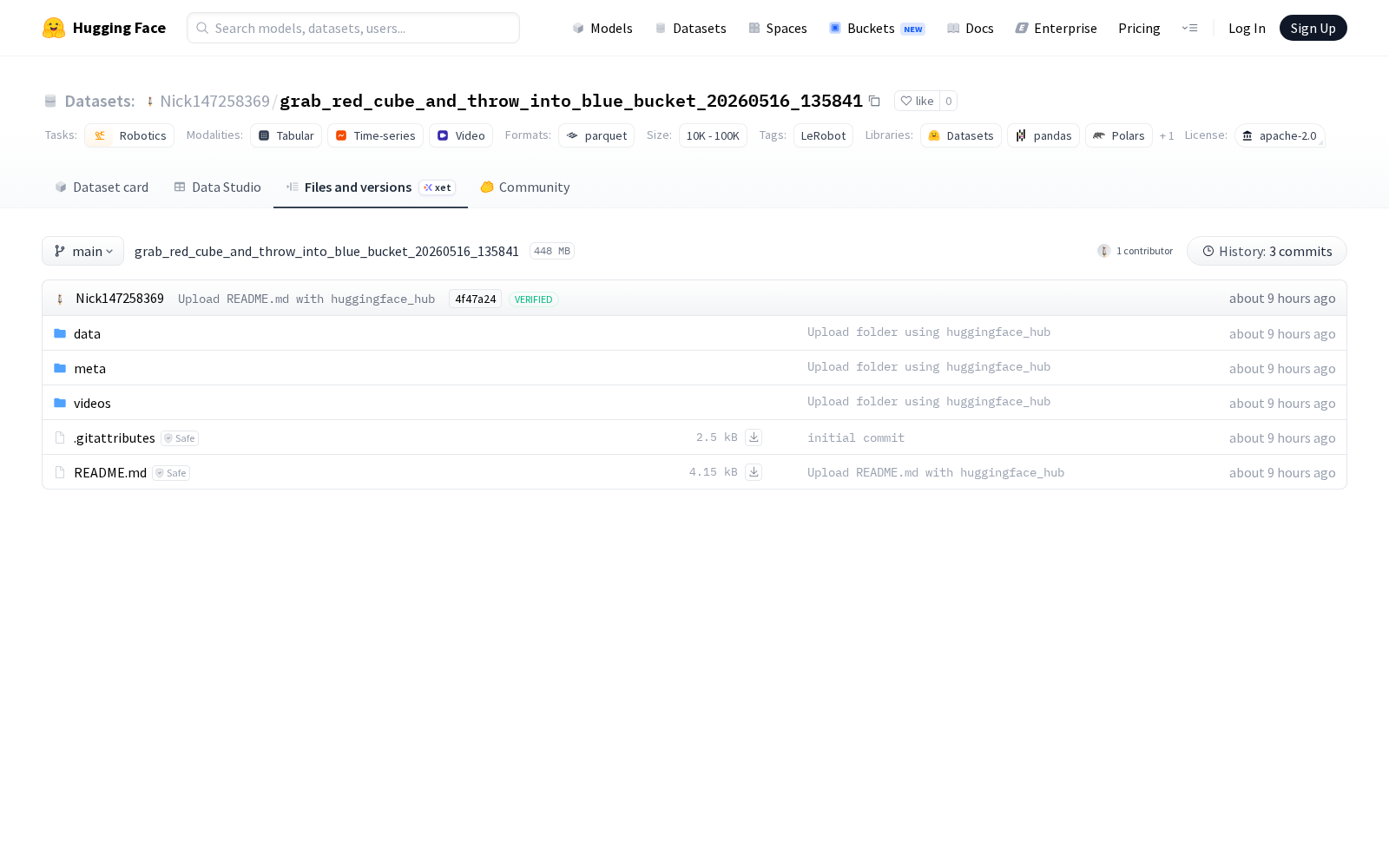
据公开信息显示,该数据集围绕「抓取红色立方体并投入蓝色桶」的典型分拣任务采集,共包含40个完整操作序列(episodes)、合计16939帧标注数据,采集帧率为30fps,可完整覆盖机械臂从识别物体、规划路径、抓取到投放的全流程时序特征,数据连续性、标注同步性均满足端到端模型的训练要求。数据集结构覆盖三大维度:其一是动作数据,包含6维浮点数标注的机械臂全关节位置信息,覆盖肩部平移、肩部提升、肘部弯曲、腕部弯曲、腕部旋转和夹爪位置全控制维度,可直接用于控制策略的训练;其二是观测数据,除同步采集的6维关节状态观测数据外,还同步收录了前视、顶部双视角摄像头采集的视觉数据,图像分辨率为480x640、3通道,采用av1编码存储无音频视频,可满足多模态视觉-动作模型的训练需求;其三是标准化元数据,包含时间戳、帧索引、episode索引、任务索引等标注信息,方便研发人员快速拆分、调用数据集子集。本次发布的数据集适配so_follower型机械臂,数据以parquet结构化数据格式和mp4视频格式存储,结构化数据总大小约100MB,视频文件总大小约200MB,所属任务类别为机器人学,可直接用于机器人控制模型的训练与效果评估。
从应用价值来看,该数据集针对固定特征物体抓取投放场景的专项标注属性,可广泛应用于工业产线的特定物料分拣、物流仓储的指定SKU分拣、服务机器人的物品归置等场景的算法研发,既可以用于训练端到端的视觉引导机械臂控制模型,也可以用于现有抓取算法的泛化性、准确率评测,大幅降低中小研发团队的实机数据采集成本,缩短相关模型的研发落地周期,也为机器人操作领域的标准化评测提供了新的基准数据集选择。
查看grab_red_cube_and_throw_into_blue_bucket_20260516_135841
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)