

近年来,通用服务机器人、人形机器人赛道进入商业化落地的关键阶段,餐饮服务、家庭照料、办公辅助等场景的需求持续释放,但真实物理场景下的细粒度操作标注数据供给不足,已经成为制约机器人操控能力泛化、适配多元场景的核心瓶颈之一。作为全球AI开源社区的核心平台,HuggingFace推出的LeRobot是当前机器人领域广泛采用的标准化数据集格式,其核心价值在于统一不同研发主体的机器人训练数据结构,降低跨机构、跨场景的模型适配成本,推动机器人学习技术的开源协作与快速迭代。
此次nodogoro发布的咖啡制备场景数据集,正是针对服务机器人高频落地场景打造的垂直领域高质量训练数据样本。咖啡制备流程涉及抓握不同材质/形态的容器、控制接液时长与流量、多步骤任务串联、空间避障等多个机器人操控核心难点,该数据集覆盖的场景变量,不仅可用于训练机器人的标准化咖啡制作流程,更可迁移到餐饮服务场景下的饮品制作、餐品递送,家庭场景下的餐具整理、日常物资取用,办公场景下的文件传递、物品整理等多元日常物品操控任务,帮助机器人模型提升抓握力度控制、空间路径规划、复杂任务拆解等核心能力。
作为机器人领域垂直场景数据要素的典型供给案例,本次数据集的开源发布,将进一步丰富LeRobot格式的训练数据供给池,降低中小研发团队的训练数据获取门槛,对推动通用机器人操控技术的普惠化发展、加速服务机器人的商业化落地进程具有重要意义。
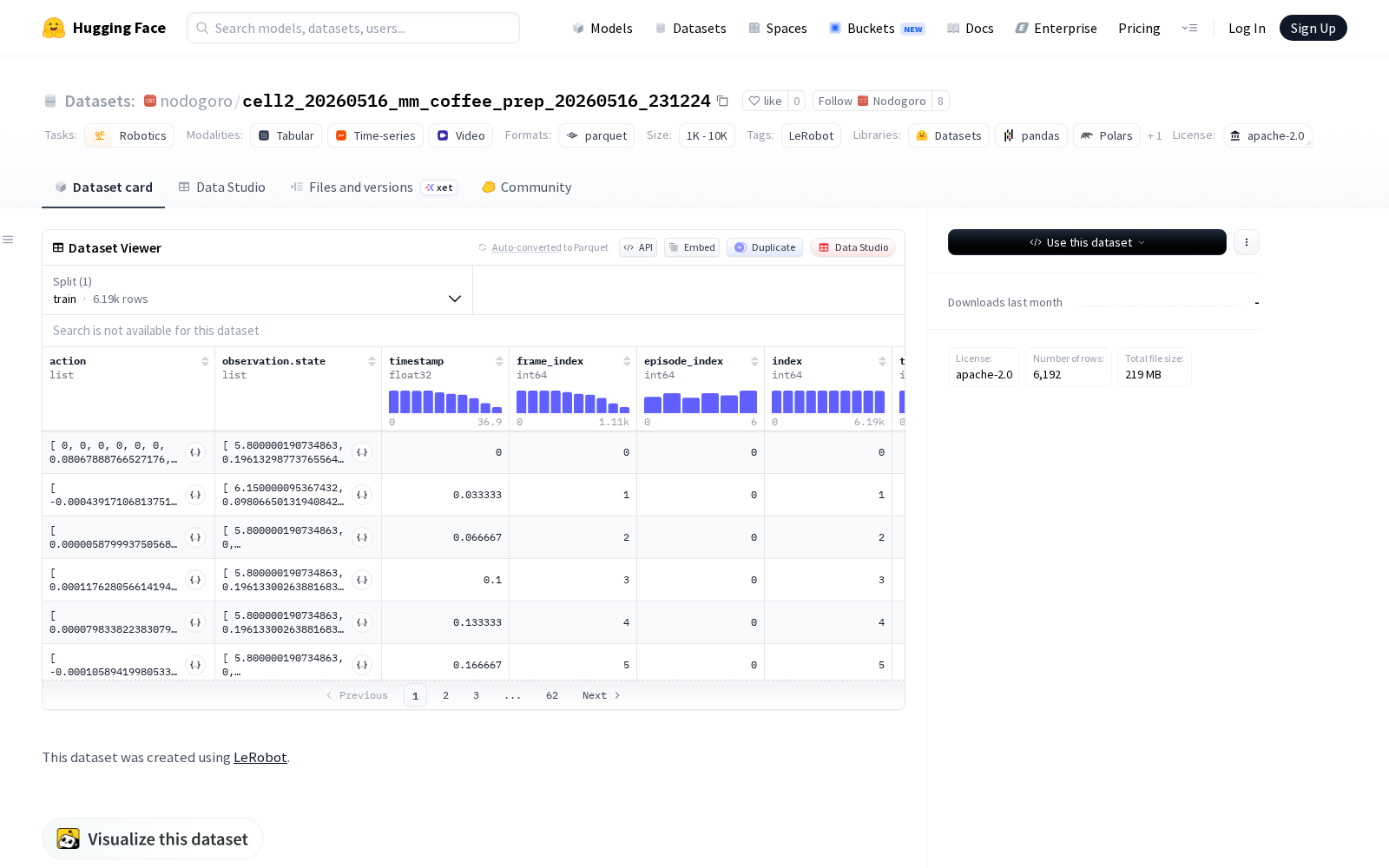
nodogoro本次发布的数据集cell2_20260516_mm_coffee_prep_20260516_231224,该数据集为HuggingFace LeRobot格式机器人数据集。
查看cell2_20260516_mm_coffee_prep_20260516_231224
Dataset card内容:
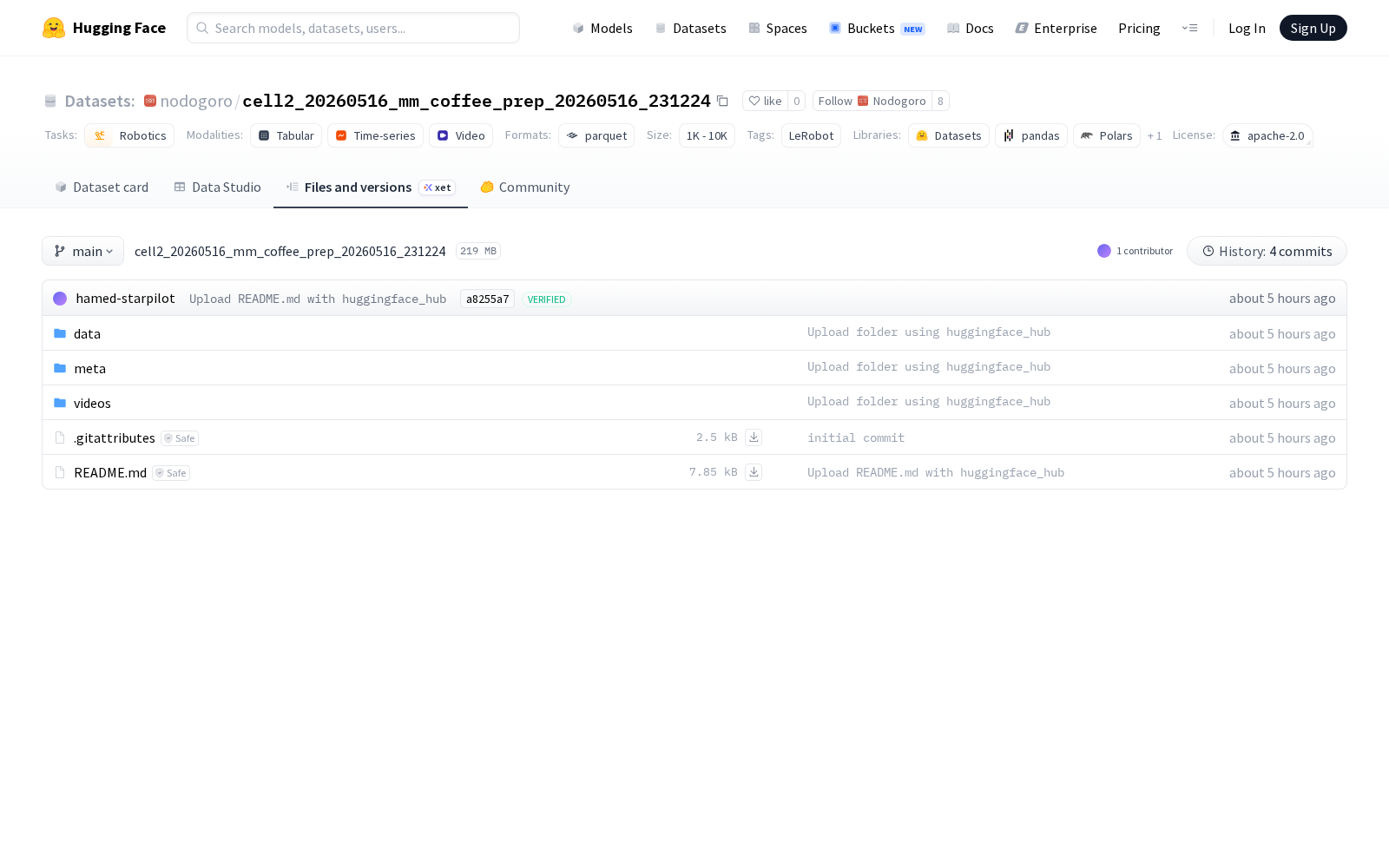
Files and versions内容:



_1769672084863.jpg)