

当前,协作机器人已成为工业自动化、智能仓储、精密制造等领域的核心装备,而模仿学习、强化学习等AI技术的落地,高度依赖匹配特定机型、覆盖多维度传感特征的高质量训练数据集。相较于真实场景数据采集的高成本、低效率,标注完善的仿真数据集能够大幅降低机器人算法研发门槛,缩短技术落地周期,已成为机器人领域核心的数据要素供给方向。
近日,机器人技术研发机构UMA-Robots正式对外发布9153_minimal_sim_franka_panda_eval_20000专用数据集,该数据集于2026年5月17日首发于全球知名AI开源社区HuggingFace,是目前少数针对Franka Panda协作机器人打造的标准化仿真数据集,核心面向机器人控制、模仿学习、强化学习等研发场景。
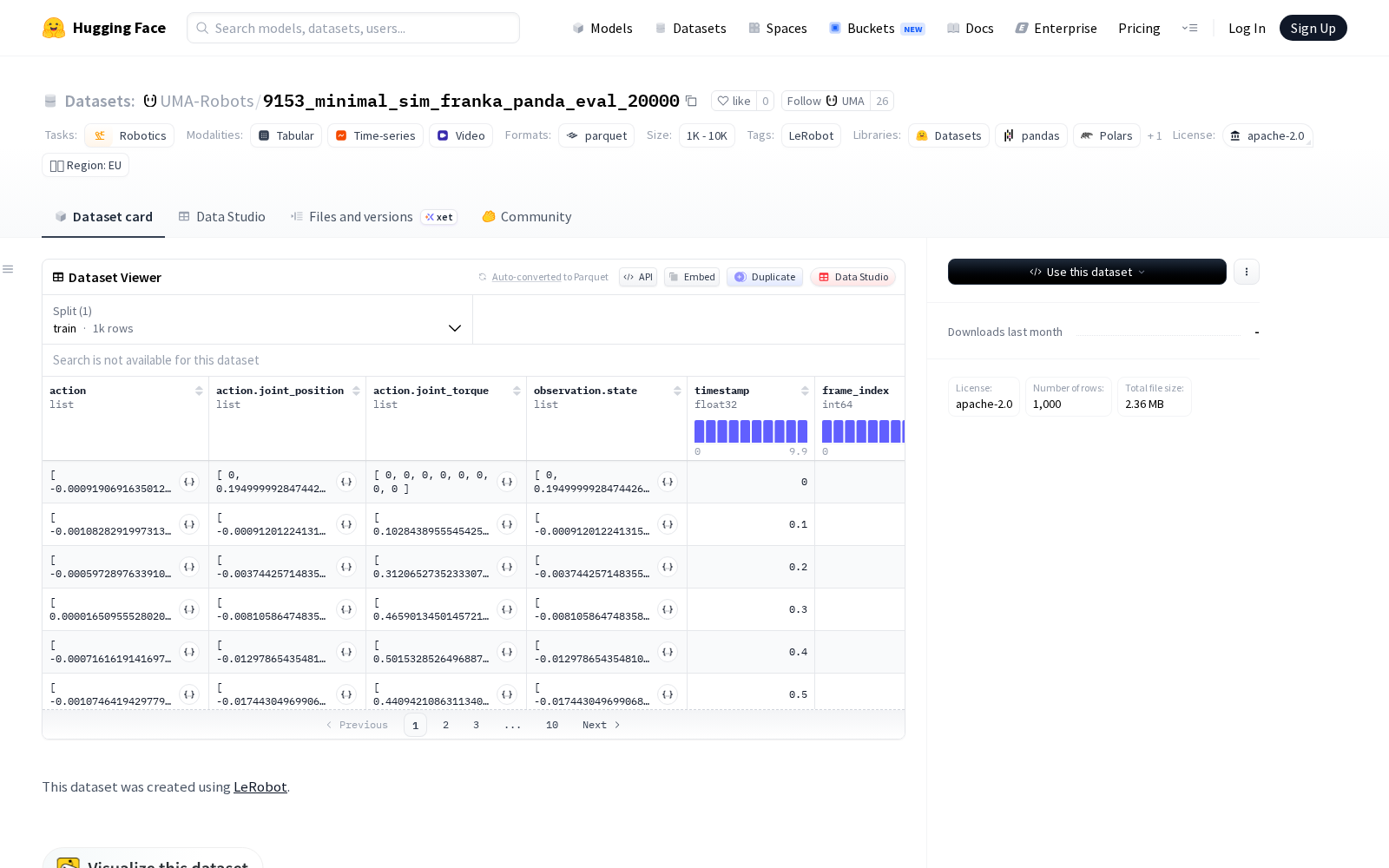
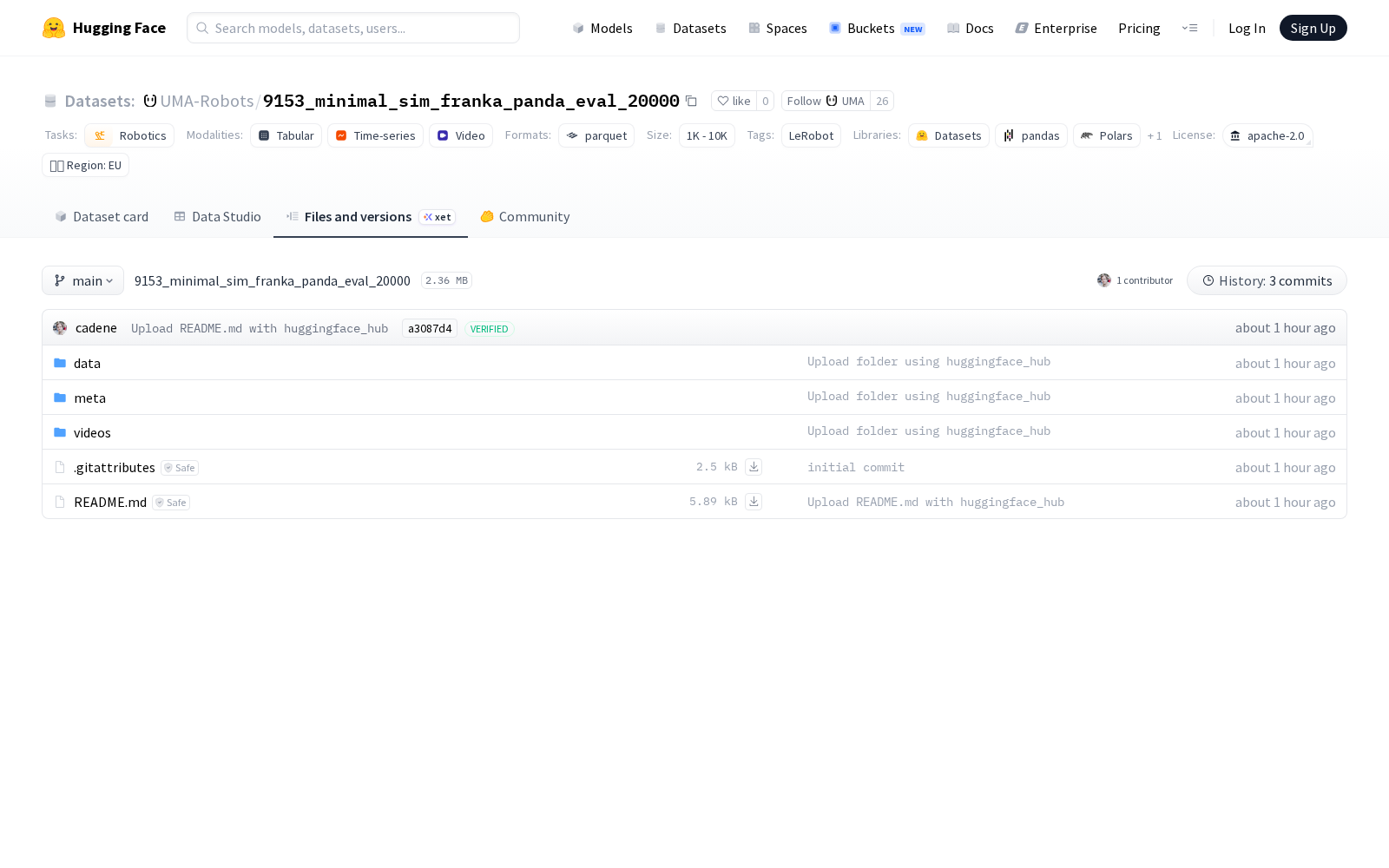
据了解,本次发布的数据集基于LeRobot工具创建,后者是目前全球机器人学习领域应用最广泛的开源数据制作工具之一,能够实现机器人动作、传感、视觉等多维度数据的同步采集与标准化标注。本次发布的数据集专门适配全球科研与工业领域普及率极高的Franka Panda 7自由度协作机器人,共包含10个训练集片段,总计1000帧有效数据;其中结构化数据采用高效压缩的Parquet格式存储,视觉视频文件采用通用MP4格式存储,帧率为10fps,兼顾了数据读取效率与跨平台兼容性。
从数据维度来看,该数据集覆盖了机器人研发所需的全链路核心特征:包括末端执行器位置、夹爪位置等动作数据,关节位置、关节扭矩等本体传感数据,关节位置、速度、扭矩,末端执行器位置和速度等观察状态数据,同时同步搭载了机器人前方摄像头、手腕摄像头拍摄的128x128分辨率3通道视频图像,所有特征均标注了明确的形状与数据类型,开发者可直接调取使用,无需额外做数据清洗与格式适配。
从应用场景来看,该数据集可广泛应用于多个机器人研发方向:在机械臂控制领域,开发者可基于数据集的多维度传感数据训练轨迹规划、力控算法,提升精密装配、柔性分拣等场景的操作精度;在模仿学习领域,同步匹配的视觉与动作数据可支撑端到端的操作行为学习,降低人工标注成本;在强化学习领域,标准化的仿真场景数据可作为基准测试集,验证不同强化学习策略的稳定性与泛化性。
业内分析指出,专用机型匹配数据集的缺失,一直是制约协作机器人AI算法落地的核心瓶颈之一,本次UMA-Robots发布的数据集填补了Franka Panda机型仿真训练数据的供给空白,对于降低机器人研发成本、加速行业技术迭代,完善机器人领域数据要素供给体系具有积极意义。
查看9153_minimal_sim_franka_panda_eval_20000
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)