

随着人形机器人、协作机器人技术的快速落地,适配细分场景的高质量标注数据集已成为机器人感知、决策算法迭代的核心支撑。尤其是在模仿学习、视觉伺服控制两大核心技术方向,多模态数据的时间戳对齐、维度完整性直接决定了模型训练的效率与落地效果,而行业内适配通用跟随式机器人的轻量化开源数据集供给长期存在缺口。近日,开发者jjr1007正式推出的专用数据集dino_diffusion_dagger_13,正是瞄准这一行业需求打造。
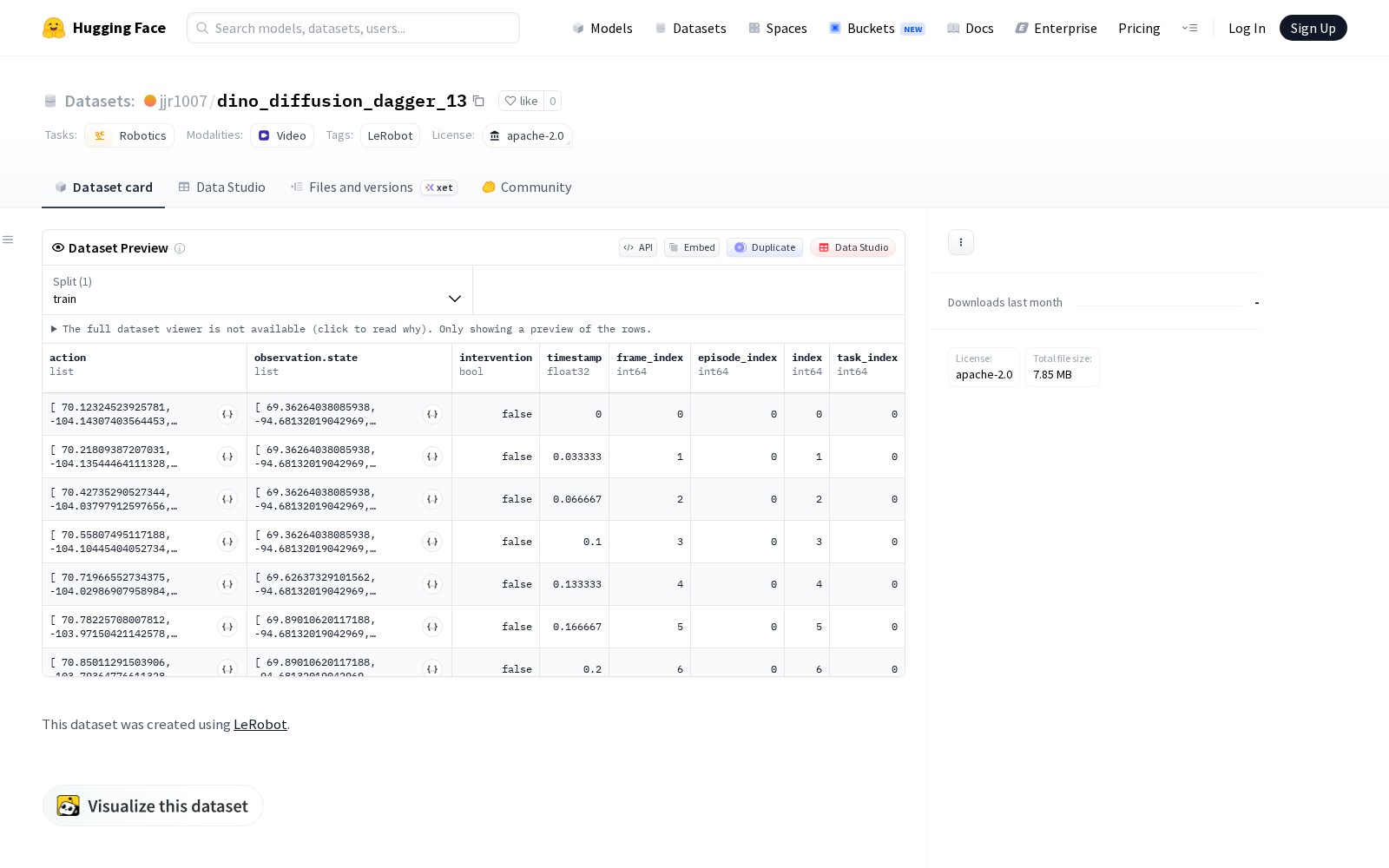
据介绍,jjr1007本次发布的dino_diffusion_dagger_13数据集基于机器人学习领域主流开源框架LeRobot创建,可与多数主流机器人研发pipeline直接兼容。该数据集覆盖1个完整的机器人操作episode(任务序列),总帧数达891帧,采集帧率为30FPS,可完整还原单轮机器人操作的全流程动作与环境变化。
数据集包含多维度对齐的标注特征:动作(action)维度包含6个浮点数值,对应机器人肩部平移、肩部升降、肘部弯曲、腕部弯曲、腕部滚动和夹持器位置6个核心关节的位置参数,覆盖通用协作机械臂的全维度动作空间;观测状态(observation.state)同样包含6个浮点数值,与动作维度一一对应,可用于模仿学习场景下的动作误差校验;观测图像(observation.images.front)为机器人前视视角的同步视频数据,分辨率为480x640、3通道,采用高压缩比的AV1编码,兼顾视觉清晰度与读取效率,适配视觉伺服控制场景的视觉特征提取需求;此外数据集还包含布尔型干预标志(intervention)、时间戳、帧索引、集索引、任务索引等完备元数据,方便研发人员灵活进行数据切片、场景筛选与效果回溯。
本次数据集的采集载体为so_follower型跟随机器人,数据采用大数据领域通用的Parquet列式存储文件(数据文件)与MP4视频文件两类格式存储,其中数据文件大小为100MB,视频文件大小为200MB,整体轻量化的体积可降低中小研发团队的下载与存储成本,数据集已默认完成训练集分割(索引0到1),进一步减少研发人员的数据预处理工作量。
从应用价值来看,该数据集可广泛覆盖机器人领域两大核心研发场景:在模仿学习方向,研发团队可基于动作、观测状态、视觉数据的对齐标注,训练机器人复刻人类示教的操作轨迹,可用于工业场景下的精密组装、分拣,服务场景下的物品抓取、家居操作等任务的算法训练,降低人工反复示教的成本;在视觉伺服控制方向,同步的前视图像与关节状态数据可支撑机器人视觉反馈调整算法的训练,提升机器人在非结构化场景下动态避障、移动操作的精准度。此外,该数据集的标准化结构也可作为行业基准测试集,用于不同机器人学习算法的性能对标,推动行业研发效率提升。
作为国内机器人领域开源数据集的新增供给,本次dino_diffusion_dagger_13的发布也为国内机器人数据要素的开源开放、标准化建设提供了参考样本,有助于降低中小研发团队的技术门槛,推动机器人技术在实体产业的落地普及。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)