

近年来,随着协作机器人、服务机器人产业的快速落地,机器人学习(Robot Learning)领域对高质量、场景化的多模态训练数据集需求持续攀升。相较于单臂机器人,双臂机器人的精细操作涉及多肢体协同、视觉-力控耦合、动态环境感知等多重技术难点,相关标准化数据集的稀缺已成为制约双臂机器人控制算法迭代、场景落地的核心瓶颈之一。近日,机器人技术研发主体nodogoro正式发布双臂机器人控制专用数据集cell2_20260516_mm_coffee_prep_20260516_225642,该数据集于2026年5月17日首发于全球知名AI开源社区HuggingFace,主要面向双臂机器人操作、视觉伺服控制两大研发领域。
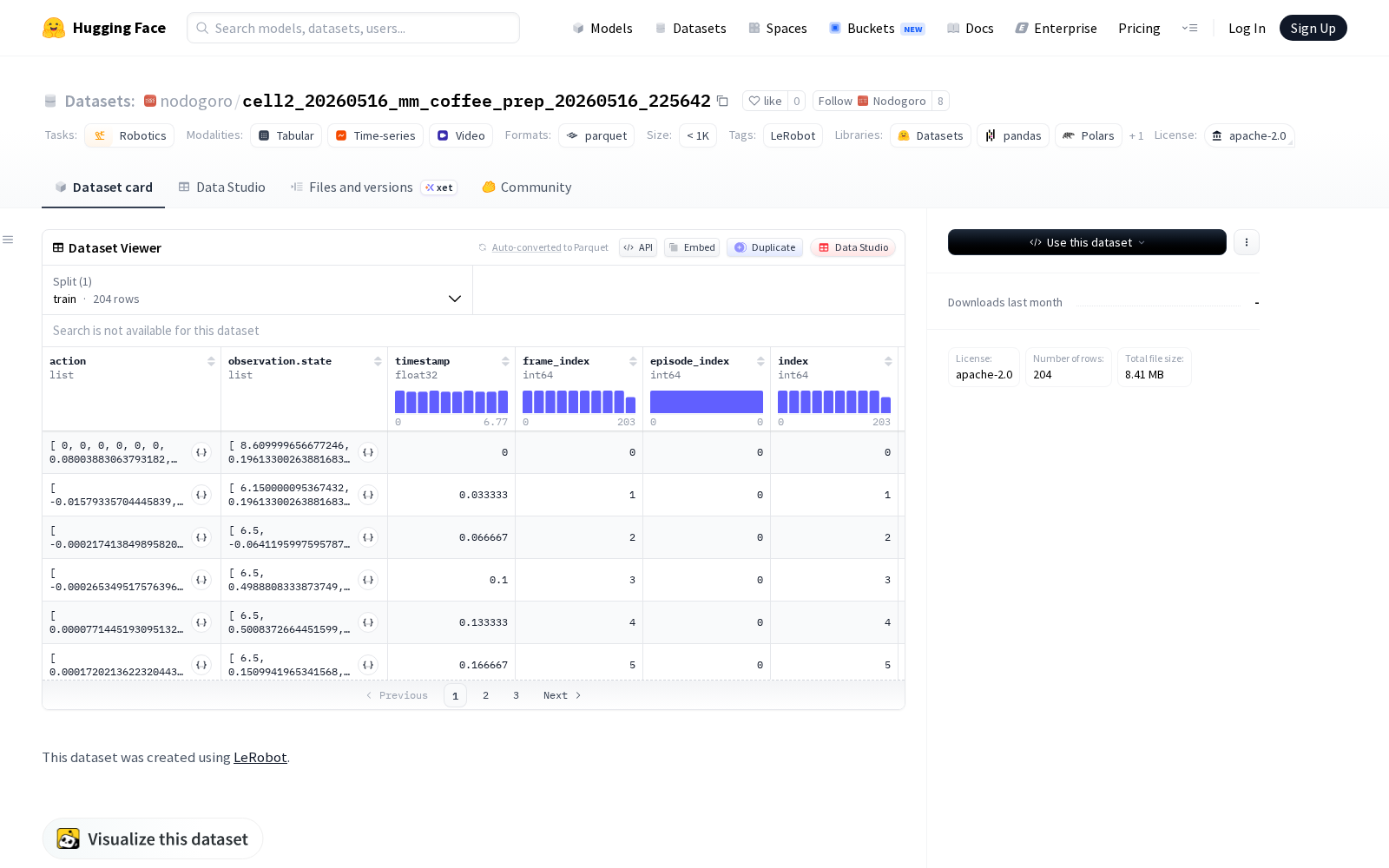
据介绍,该数据集基于HuggingFace开源机器人学习工具栈LeRobot创建,具备良好的生态兼容性,可直接对接主流机器人学习模型训练框架,大幅降低研发人员的数据预处理成本。数据集专门适配starpilot_yam_gripper型号双机械臂的操作任务,覆盖完整咖啡制备操作流程,共包含1个操作序列(episode)、204帧采样数据,采用大数据领域通用的列式存储格式Parquet存储结构化数据,读取效率远高于传统存储格式,适配AI训练的高频调用需求;总数据文件大小为100MB,配套视频文件大小为200MB,采样帧率为30fps,可满足高频运动控制模型的训练要求。
该数据集覆盖多维度的机器人运行与环境感知数据,核心特征包括三类:第一是动作控制数据,涵盖机械臂的空间位置、旋转角度、夹爪开合宽度等核心操作参数,可支撑双臂协同动作的轨迹学习;第二是状态观测数据,包含编码器角度、IMU加速度与角速度、位姿坐标与四元数、夹爪实时开合状态等运行状态参数,可为机器人运动精度校准、误差校正模型训练提供数据支撑;第三是多视角环境感知数据,包含左腕、右腕、基座三个位置摄像头采集的RGB图像与深度图像,分辨率分别为480x640和768x1024,多视角数据的融合可直接用于视觉伺服控制算法的训练,解决动态场景下的操作对象识别、位置偏移校正等问题。此外数据集还配套了时间戳、帧索引、episode索引等完整元数据,可满足不同研究方向的标注、训练需求。
从应用价值来看,该数据集聚焦咖啡制备这一典型的精细服务操作场景,研发人员可基于该数据集开展多个方向的研究:一是双臂精细操作模型训练,除咖啡制备外,相关模型还可迁移至餐饮服务场景的食品加工、摆盘,工业场景的精密零部件组装、检测等领域;二是视觉伺服控制算法优化,解决动态操作场景下的障碍物规避、操作力调整等技术难点;三是人-机协作交互逻辑验证,为服务机器人在商业场景下与人类协同作业的路径规划提供训练素材。该数据集的发布,进一步丰富了机器人学习领域的开源数据供给,也为数据要素在高端制造业、服务机器人产业的落地应用提供了参考样本,对推动机器人领域的开源协作、加快相关技术的场景落地具有积极意义。
查看cell2_20260516_mm_coffee_prep_20260516_225642
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)