

当前,具身智能已成为全球人工智能领域的核心落地方向之一,其中可完成双手协作任务的双机械臂,更是工业精密组装、服务机器人、特种作业等场景的核心研发载体。但长期以来,双机械臂算法研发面临真实场景训练数据稀缺的痛点:多模态数据同步采集难度大、标注成本高,中小研发团队往往难以承担自建数据集的投入,制约了行业技术迭代效率。近日,人工智能研发机构Nodogoro正式发布面向双机械臂操控场景的专用数据集cell1_20260516_youssef-mohamed_9pm-12pm_lego20260516_224552,该数据集于2026年5月17日首发于全球知名AI开源社区HuggingFace,专门针对starpilot_yam_gripper类型双机械臂的操控任务研发,是机器人学习领域的又一高质量开源数据资产。
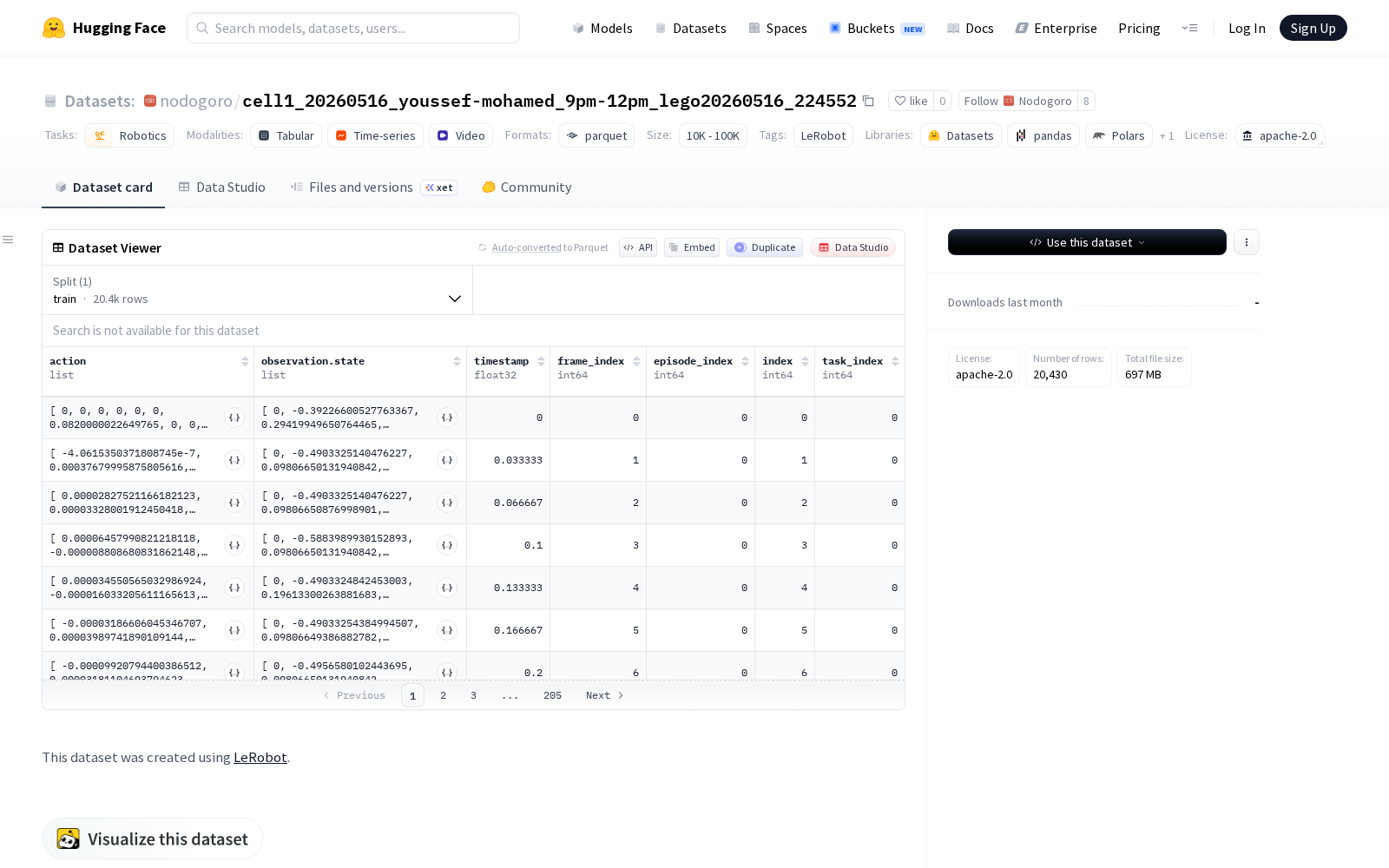
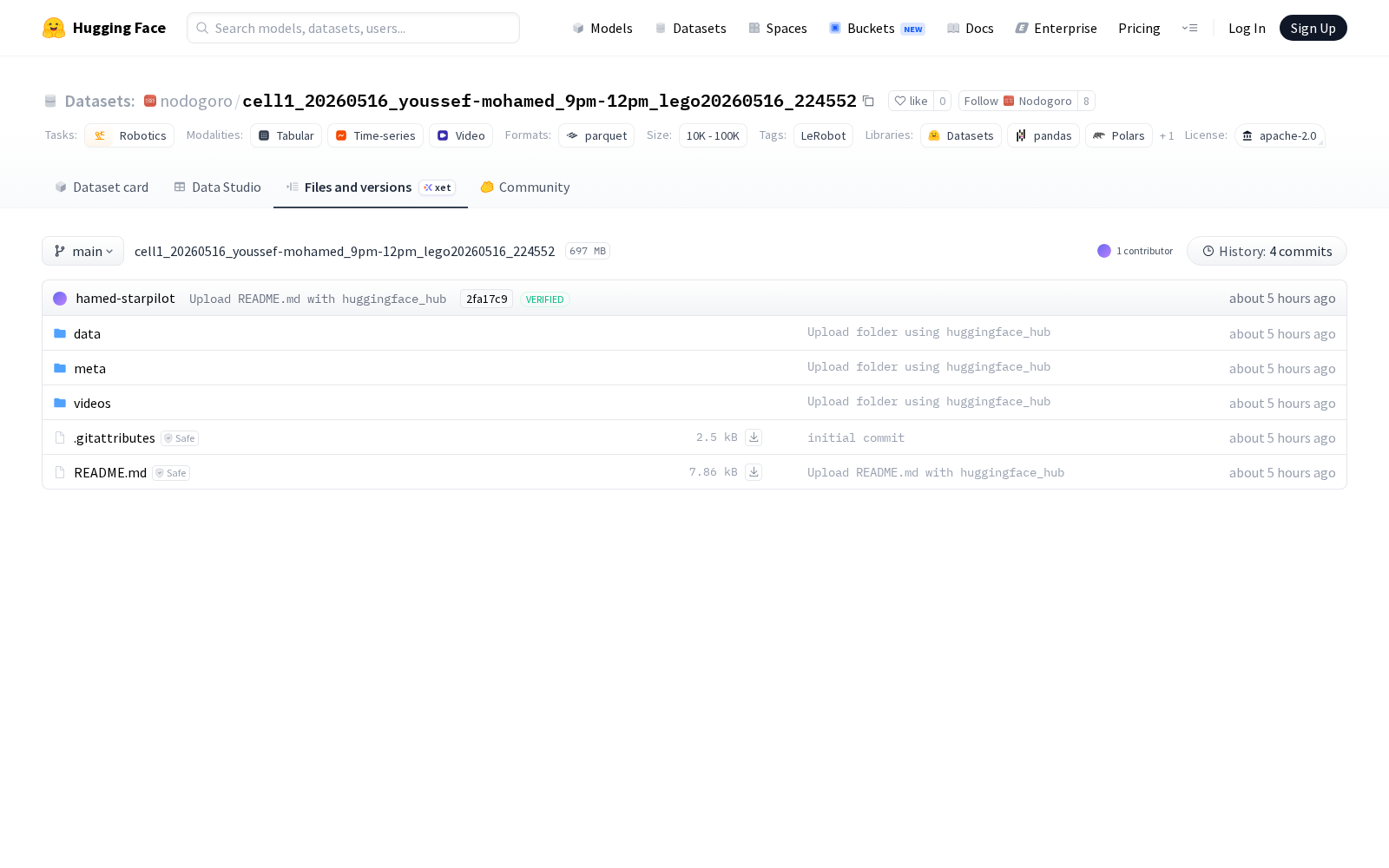
本次发布的数据集基于具身智能领域主流的LeRobot开源工具链创建,共包含2个任务序列(episodes)、20430帧采样数据,采集帧率为30fps,总数据量约300MB;其中结构化数据采用parquet格式存储,视频素材采用通用mp4格式,适配主流AI训练框架,开发者可直接快速调用无需额外格式转换。
该数据集覆盖了双机械臂操控任务所需的完整多模态数据维度:动作层面包含两个机械臂的14维控制参数,涵盖位置、旋转角度、夹爪宽度等核心操控变量;状态观测层面包含32维传感器数据,覆盖编码器角度、IMU加速度、陀螺仪数据、姿态四元数、夹爪实时状态等机械臂运行全量状态信息;视觉感知层面同步采集了左腕、右腕、基座三个机位的RGB图像与深度图像,分辨率分别为480x640和768x1024,可支撑多视角视觉感知算法的训练需求。
从应用场景来看,该数据集可广泛应用于机器人模仿学习、强化学习等研发方向:开发者可基于数据集的人类演示数据快速训练双机械臂的精细操作能力,降低自主采集演示数据的成本;也可将其作为标准化基准测试集,验证不同强化学习算法在双机械臂协作任务上的性能表现;此外,同步采集的多模态数据也可用于机械臂多模态融合感知算法的研发,提升复杂场景下机械臂的自主决策精度,相关训练成果可迁移至工业电子元件组装、精密分拣、民用乐高教育机器人等多个落地场景。本次数据集的开源,也为国内外科创团队提供了统一的双机械臂研发数据基准,有助于降低具身智能领域的研发门槛,推动双机械臂操控技术的快速落地。
查看cell1_20260516_youssef-mohamed_9pm-12pm_lego20260516_224552
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)