

近年来,随着工业协作机器人、通用人形机器人赛道的快速爆发,机器人运动控制算法、强化学习模型的训练需求持续攀升,但当前行业内可用的高质量真实机器人运动数据集供给长期不足,大量研发团队依赖仿真数据开展训练,往往面临虚实场景偏差导致的模型落地效果打折扣的问题,高标注精度、高时序密度的真实机器人运动数据,已经成为机器人行业研发环节的核心刚需生产要素。
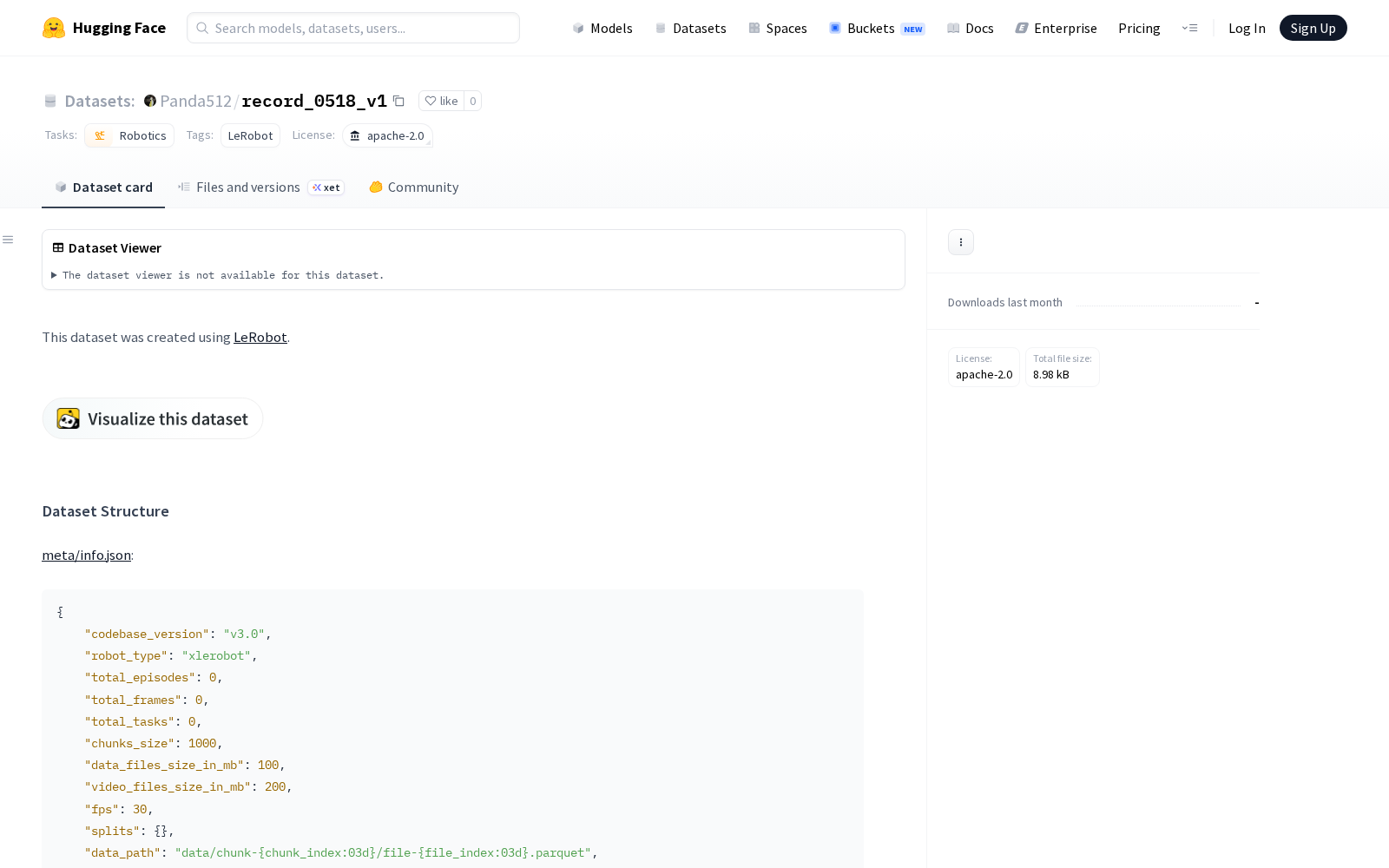
在此背景下,Panda512于2026年5月18日正式在HuggingFace平台首发record_0518_v1机器人学专属数据集,为行业提供标准化的真实双臂机器人运动训练素材。该数据集基于LeRobot工具创建,采集自xlerobot双臂机器人的真实运行数据,覆盖机器人全动作链路的核心特征维度。
据官方披露的参数信息,该数据集同时包含机器人动作与状态观测两类核心数据,其中动作特征涵盖左右臂关节位置(含肩部平移、肩部升降、肘部弯曲、腕部弯曲、腕部滚动、夹爪位置)、头部电机位置及x/y轴速度、角速度共17个维度,观测状态特征维度与动作特征完全对齐,同样为17个维度,两类数据的对应关系可直接支撑机器人控制算法的输入输出映射训练。存储方面,数据集采用高压缩比、高读取效率的Parquet格式存储,采样帧率达30fps,同步配套时间戳、帧索引、回合索引、任务索引等完整元数据,可满足不同研发场景的数据集拆分、标注与调用需求。
据官方标注,该数据集可广泛应用于机器人控制、强化学习等研发任务,典型应用方向包括:工业双臂协作机器人的精密装配、柔性分拣场景的运动路径规划算法训练;通用人形机器人的上肢动作模拟、人机交互场景的控制模型迭代;强化学习领域的稀疏奖励训练、多任务迁移学习的基准测试;以及机器人仿真环境的虚实参数校准、数字孪生场景的运动映射模型开发等。作为垂直于机器人赛道的细分数据集,record_0518_v1的上线进一步丰富了机器人研发领域的训练数据供给,可有效降低中小研发团队的原始数据采集成本,缩短算法迭代周期,同时也为数据要素市场的垂直领域专业数据供给体系建设提供了参考样本。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)