

当前具身智能赛道正处于高速发展期,工业机械臂、服务机器人、人形机器人的运动控制、视觉交互算法迭代,对高质量、多模态的实采标注数据集需求持续攀升,但机器人领域的标准化数据集长期存在采集成本高、标注维度不齐、场景覆盖有限等痛点,大幅拉高了中小团队的研发门槛。近日,苏黎世联邦理工学院(ETH)robotlearning团队正式对外发布tv-config3-red-blue-green-clean-aug1专项数据集,该数据集由专注于机器人学习资源建设的开源项目LeRobot打造,于2026年5月18日首发于全球最大AI开源社区Hugging Face,主要面向机器人关节控制、视觉伺服操作两大核心研发场景开放使用。
从数据集具体参数来看,本次发布的数据集共包含27个完整任务序列(episodes)、4051帧标注数据,覆盖3类典型机器人操作任务。针对机器人控制研发的核心需求,数据集同步标注了六大类动作特征,包括肩部平移、肩部提升、肘部弯曲、手腕弯曲、手腕旋转和夹爪位置,同时配套收录了与动作特征完全对齐的关节位置观测状态数据,可直接用于强化学习、模仿学习等算法的动作预测训练。除了运动控制维度的标注外,该数据集还同步采集了分辨率为480x640的前视RGB视频数据,帧率为10fps,采用AV1高压缩比编解码器存储,在保障画面清晰度的同时降低了数据加载成本,可支撑视觉伺服算法的端到端训练,即让机器人通过视觉输入直接调整运动姿态,无需额外的传感器标定流程。
从应用场景来看,该数据集的多维度对齐标注可适配多种机器人研发需求,典型应用方向包括工业机械臂的分拣、装配作业训练,服务机器人的抓取、移动物体操作研发,以及人形机器人上身运动控制算法的仿真验证等。存储规格方面,数据集的结构化标注数据采用parquet格式存储,总大小为100MB,视频文件采用通用mp4格式存储,总大小为200MB,适配绝大多数深度学习框架的训练流程,适配的机器人硬件型号为so_follower机械臂。值得注意的是,该数据集采用商业友好的Apache 2.0开源许可证,全球开发者可免费用于学术研究、商业产品研发等场景,无需额外授权。
作为全球机器人学习领域的顶级研究团队,ETH robotlearning本次发布的数据集填补了“动作-视觉”对齐标注的中小体量机器人专项数据集的空白,对于降低具身智能研发门槛、加速机器人控制算法迭代效率具有重要价值,也为全球机器人领域的数据集标准化建设提供了参考样本。
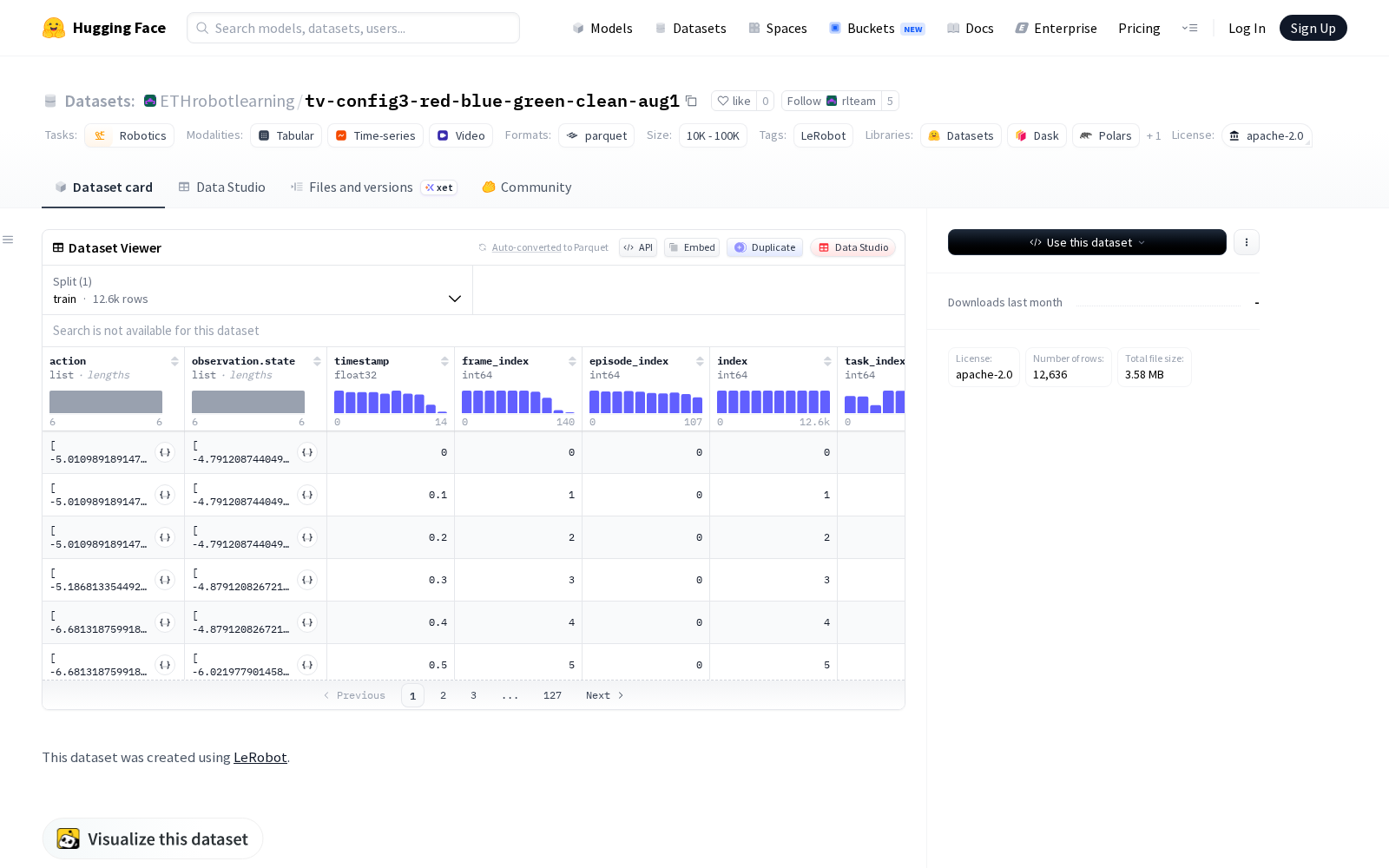
查看tv-config3-red-blue-green-clean-aug1数据集详情
Dataset card内容:
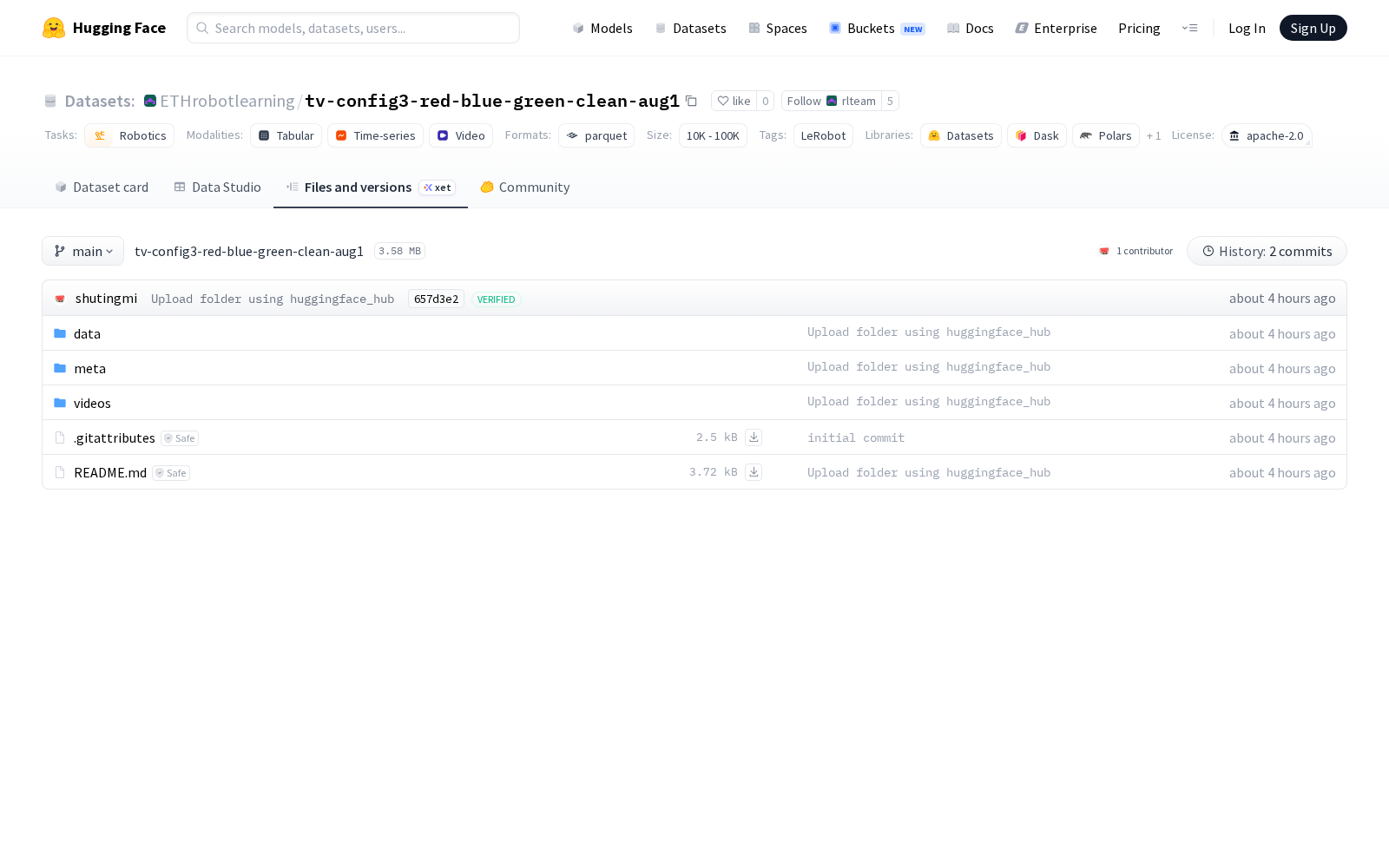
Files and versions内容:



_1769672084863.jpg)