

当前,具身智能作为人工智能落地的核心赛道之一,机器人学习的研发进程高度依赖高质量、标准化的数据集支撑,但长期以来,不同研究机构、企业团队采集的机器人操作数据存在格式不统一、标注规范不一致、评估基准不通用等问题,大幅提升了模型复现、技术横向对比的成本,也制约了模仿学习等主流机器人训练范式的规模化落地。而HuggingFace推出的LeRobot格式,正是为解决这一痛点推出的行业通用机器人数据标准,通过统一数据结构、标注字段、接口规范,让不同来源的机器人数据可以无缝接入各类模型训练框架,也为跨团队的技术评测提供了统一基底。
正是在这一行业背景下,robot-learning-group47正式发布eval_fixed_all_2k_blue_r1数据集,也是国内少有的遵循LeRobot格式标准的开源机器人专用数据集。从落地价值来看,该数据集首先可用于机器人任务的标准化评测:不管是工业机械臂的精密操作、服务机器人的家居环境交互,还是移动机器人的自主导航任务,研发团队均可基于该数据集构建统一的测试基准,输出可横向对比的性能指标,解决过往不同团队测试结果无法互验的行业痛点。在模仿学习领域,该数据集也可作为预训练基础数据集、微调验证数据集使用,帮助研发团队降低训练数据采集成本,提升模型训练效率,后续也有望拓展到机器人强化学习的奖励函数校准、跨模态机器人模型的能力验证等更多场景。
此次该数据集的上线,也进一步丰富了LeRobot生态下的机器人开源数据集供给,对于推动具身智能领域的开源协同、降低中小团队的机器人学习研发门槛具有积极意义,后续随着更多标准化机器人数据集的开放,整个行业的技术迭代速度也有望进一步提升。
robot-learning-group47本次发布的数据集eval_fixed_all_2k_blue_r1,该数据集为HuggingFace LeRobot格式机器人数据集。
Dataset card内容:
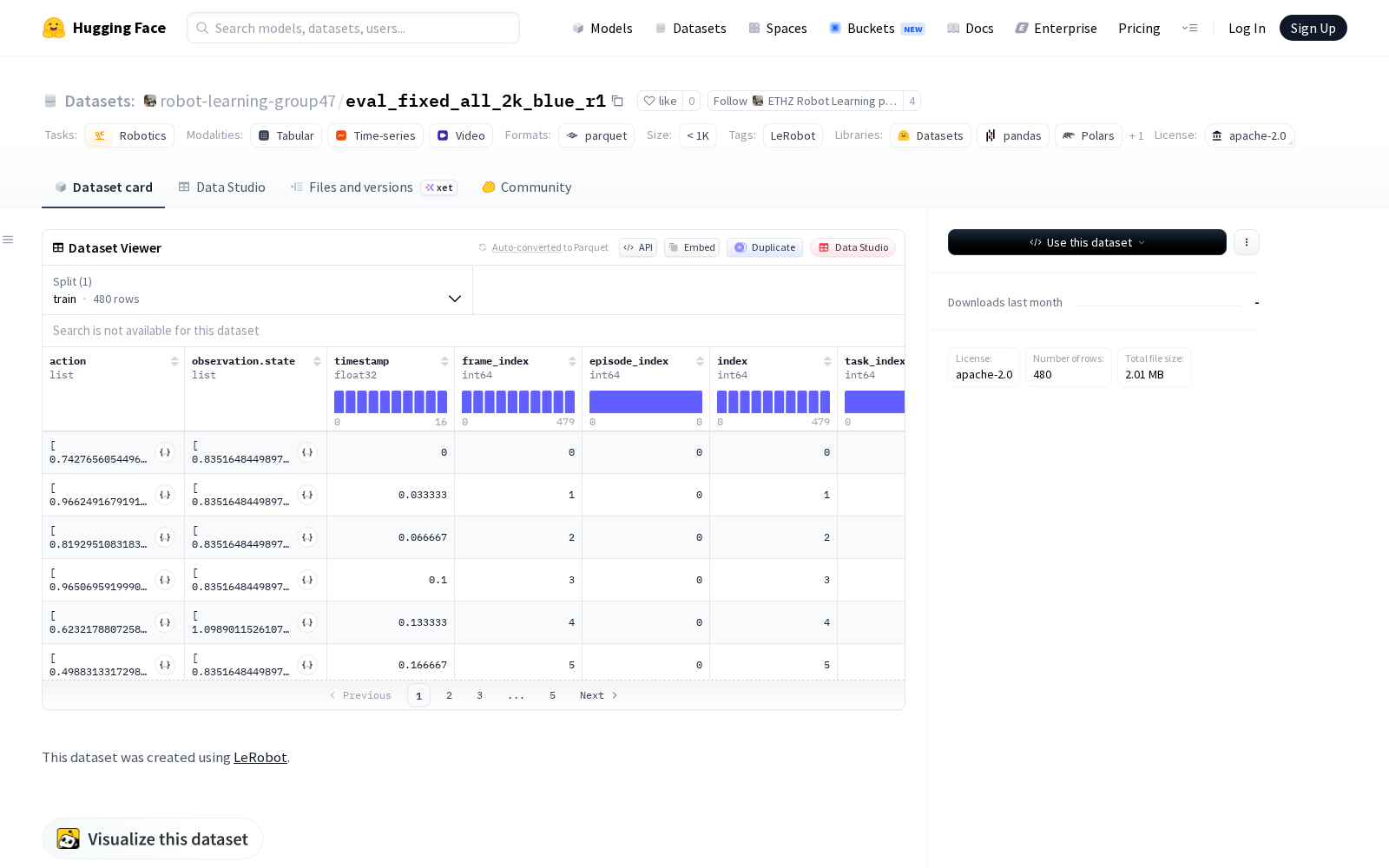
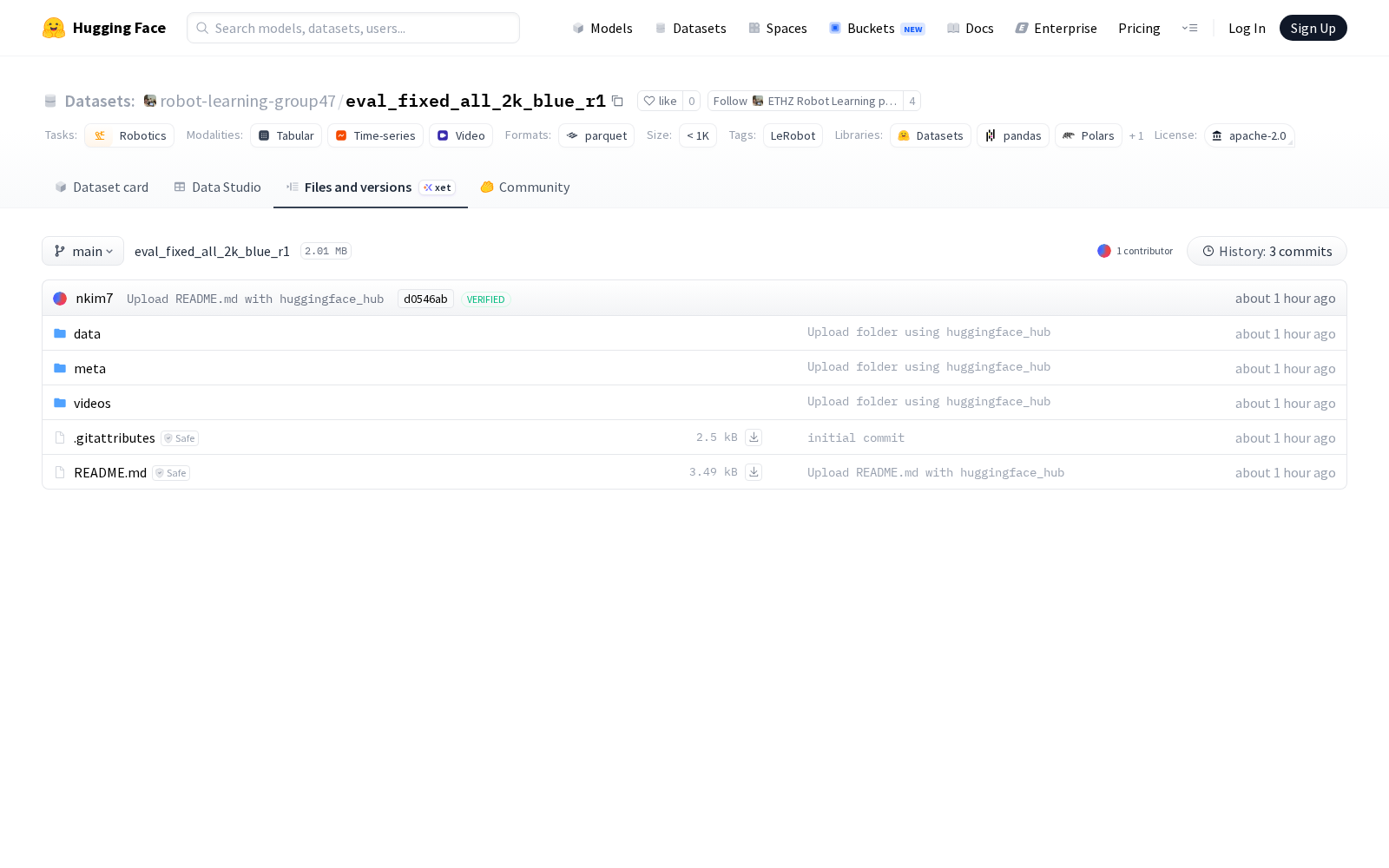
Files and versions内容:



_1769672084863.jpg)