

当前,全球人形机器人、工业协作机器人、服务机器人的商用落地进程持续加速,但精细操作场景下的分布外(OOD)泛化能力不足,一直是制约机器人从定点重复作业向复杂动态场景作业升级的核心瓶颈。作为衡量机器人多步骤任务规划、高精度协同控制能力的经典验证场景,叠杯任务长期缺乏面向分布外泛化研究的标准化公开数据集,大幅提升了中小科研团队与创业公司的研发门槛。2026年5月20日,由微软联合创始人保罗·艾伦发起成立的全球前沿AI研究机构艾伦人工智能研究所(Allen Institute for AI,简称AI2)正式开源推出eval_pi05_cup_stacking_ood数据集,填补了这一细分领域的供给空白。
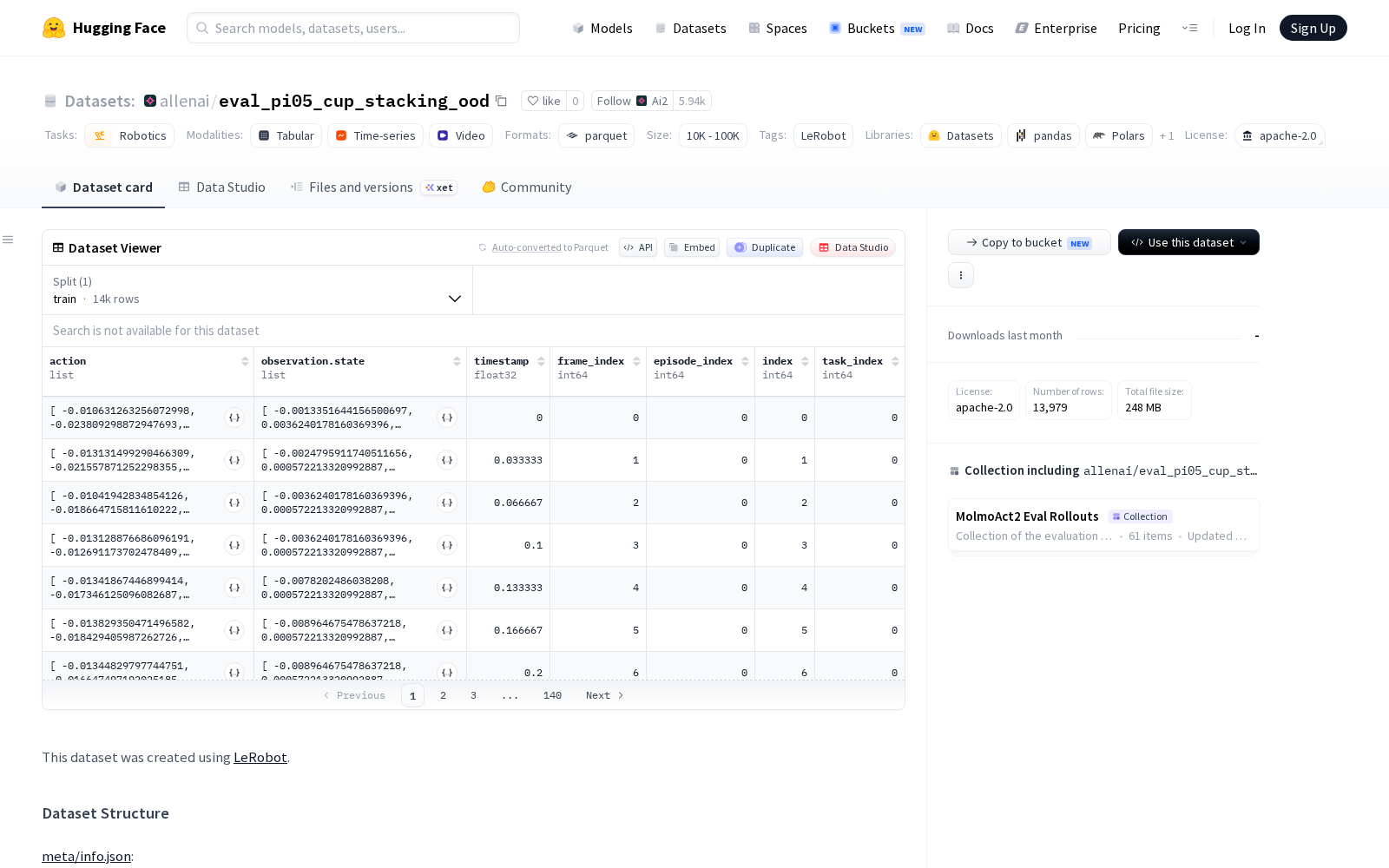
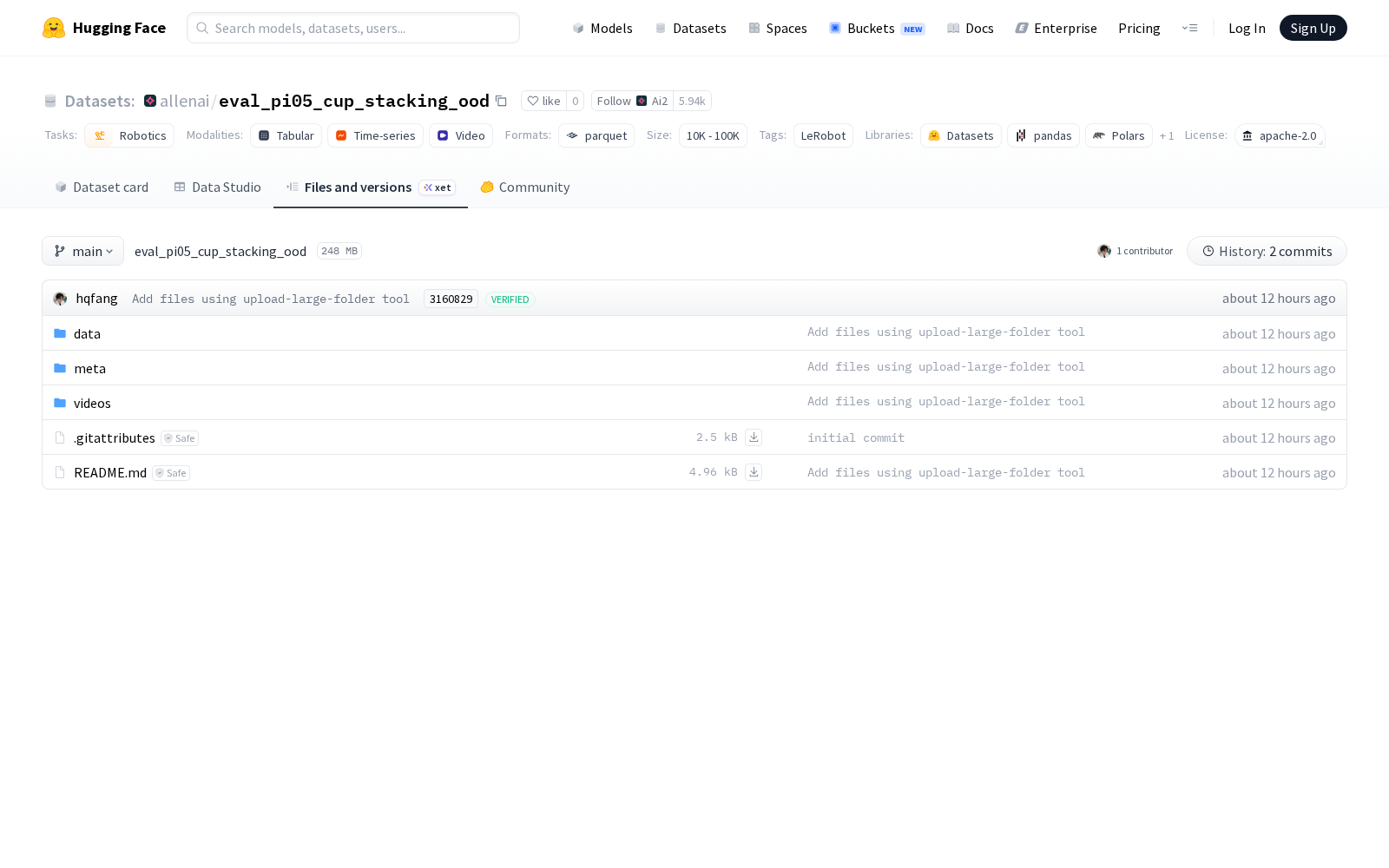
该数据集是AI2机器人学研究团队基于开源机器人工具链LeRobot构建,采用对科研与商业应用友好的Apache 2.0许可证,用户可自由进行二次开发与商用落地。数据集所有样本均来自bi_yam_follower双臂机器人平台的真实操作采集,共覆盖2个不同的叠杯任务,包含20个完整任务片段(episodes),总计13979帧结构化数据,总数据文件体积约为100MB,配套的多视角视频文件体积约为200MB,视频帧率为30fps,训练集覆盖全部20个任务片段,可同时满足模型训练与效果验证需求。 本次发布的数据集核心特征覆盖机器人操作学习的全链路需求,具体包括:1) 动作数据(action):包含左右机械臂各6个关节的位置参数和左右夹爪的位置参数,总计14维浮点向量,是机器人控制策略训练的核心标注数据;2) 状态观测(observation.state):与动作数据维度完全匹配的机器人实时关节状态数据,可用于仿真环境与真实机器人的状态对齐、策略迁移效果验证;3) 多视角图像观测(observation.images.right/left/top):覆盖右、左、顶三个视角的RGB视频数据,分辨率为640x360,采用高效压缩的AV1编码格式,可支撑视觉伺服控制、多模态感知融合等方向的研究;4) 元数据:包含时间戳、帧索引、片段索引、数据索引和任务索引,方便研究人员灵活拆分数据集,开展消融实验、不同任务维度的效果对比等研究工作。目前该数据集已明确可应用于机器人模仿学习、行为克隆、策略学习等多个机器人学核心方向的研发工作。 从行业应用价值来看,该数据集围绕叠杯场景的分布外泛化需求设计,未来可支撑多个场景的技术迭代:一是面向服务机器人、家政机器人的精细操作能力研发,验证机器人在物品摆放、餐具整理等动态场景下的任务完成率;二是面向工业双臂协作机器人的控制策略优化,为3C电子装配、精密零部件组装等场景的算法迭代提供低成本验证基准;三是面向多模态端到端机器人模型的训练,结合视觉与关节状态数据,降低真实场景数据采集的成本,加速通用机器人技术的普惠发展。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)