

当前人形机器人、工业协作机器人赛道正进入落地攻坚期,灵巧操作能力作为机器人替代人力完成精细化任务的核心指标,其算法迭代高度依赖高质量场景化训练数据,尤其是分布外(OOD)场景数据集,直接决定了机器人模型在真实复杂环境下的泛化能力与鲁棒性。近日,全球知名前沿AI研究机构Allen Institute for AI(艾伦人工智能研究所,由微软联合创始人保罗·艾伦发起成立,长期聚焦通用AI、机器人学习等领域的前沿研究)正式发布面向机器人操作场景的eval_cosmos_cup_stacking_ood数据集,首发上线于全球最大的AI模型数据集平台Hugging Face,主要面向机器人灵巧操作、模仿学习领域的研发需求。
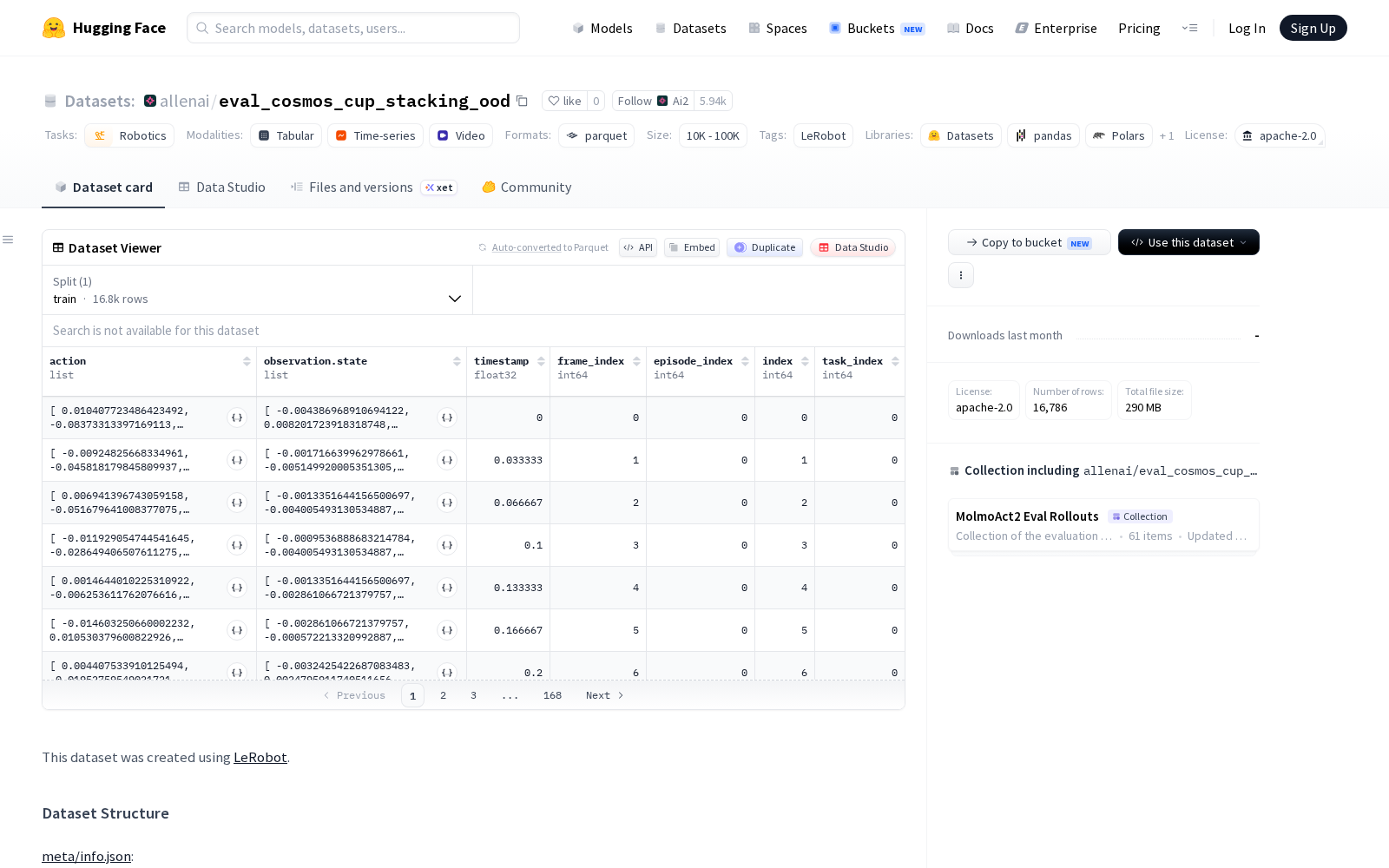
本次发布的数据集基于Hugging Face开源机器人学习工具链LeRobot构建,是专门针对双机械臂操作场景采集的标注数据集,底层采集依托bi_yam_follower双机械臂系统完成,覆盖2项堆叠杯相关操作任务,包含15个任务序列(episodes)、共16786帧有效标注数据,采集帧率为30fps。数据集整体采用轻量化存储方案:结构化标注数据以parquet格式存储,总大小约100MB,同步配套的多视角视频源文件总大小约200MB,当前仅开放训练分割(train)子集供研发人员使用。
该数据集的标注维度覆盖了机器人操作训练的全链路需求:核心动作标注为14维浮点数组,对应左右机械臂各6个关节的位置参数与2组夹爪位置参数;状态观测(observation.state)字段维度与动作参数完全对齐,可直接用于模仿学习的行为克隆、逆强化学习等算法训练;视觉观测维度同步采集了右、左、顶三个视角的实时视频流(对应observation.images.right/left/top字段),分辨率为360x640的3通道RGB格式,采用高压缩比的AV1编码,在降低存储成本的同时保留了足够的视觉特征信息。此外,数据集还配套了时间戳、帧索引、episode索引、全局索引和任务索引等辅助字段,方便研发人员根据需求灵活切分、调用数据。该数据集采用Apache 2.0开源许可证,支持学术研究与商业化开发场景免费使用,大幅降低了相关研发的准入门槛。
从应用价值来看,该数据集可广泛支撑多个方向的研发需求:学术研究层面,可用于机器人灵巧操作的分布外泛化算法验证、多视角视觉-动作对齐模型训练、Sim2Real(仿真到真实)迁移效果测试等场景;产业落地层面,可为工业协作机器人的小件装配、物料分拣,服务机器人的桌面操作、家务任务执行,人形机器人的手部精细动作迭代等场景提供训练数据源支撑,是机器人领域核心的基础设施级数据资源。
查看eval_cosmos_cup_stacking_ood
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)