

近年具身智能已成为AI落地实体产业的核心赛道,双机械臂操作作为工业柔性生产、高端自动化的核心技术,其研发高度依赖高质量、多场景的多模态演示数据集。但当前开源领域面向跨分布(OOD)场景的双机械臂专业数据集供给严重不足,多数现有数据集仅覆盖单一固定环境,无法支撑模型在复杂真实场景下的泛化能力训练。在此背景下,艾伦人工智能研究所(Allen Institute for AI,简称AI2,由微软联合创始人保罗·艾伦创立的前沿AI研究机构)正式发布eval_pi05_candy_sorting_ood数据集,填补了该细分领域的开源数据缺口。
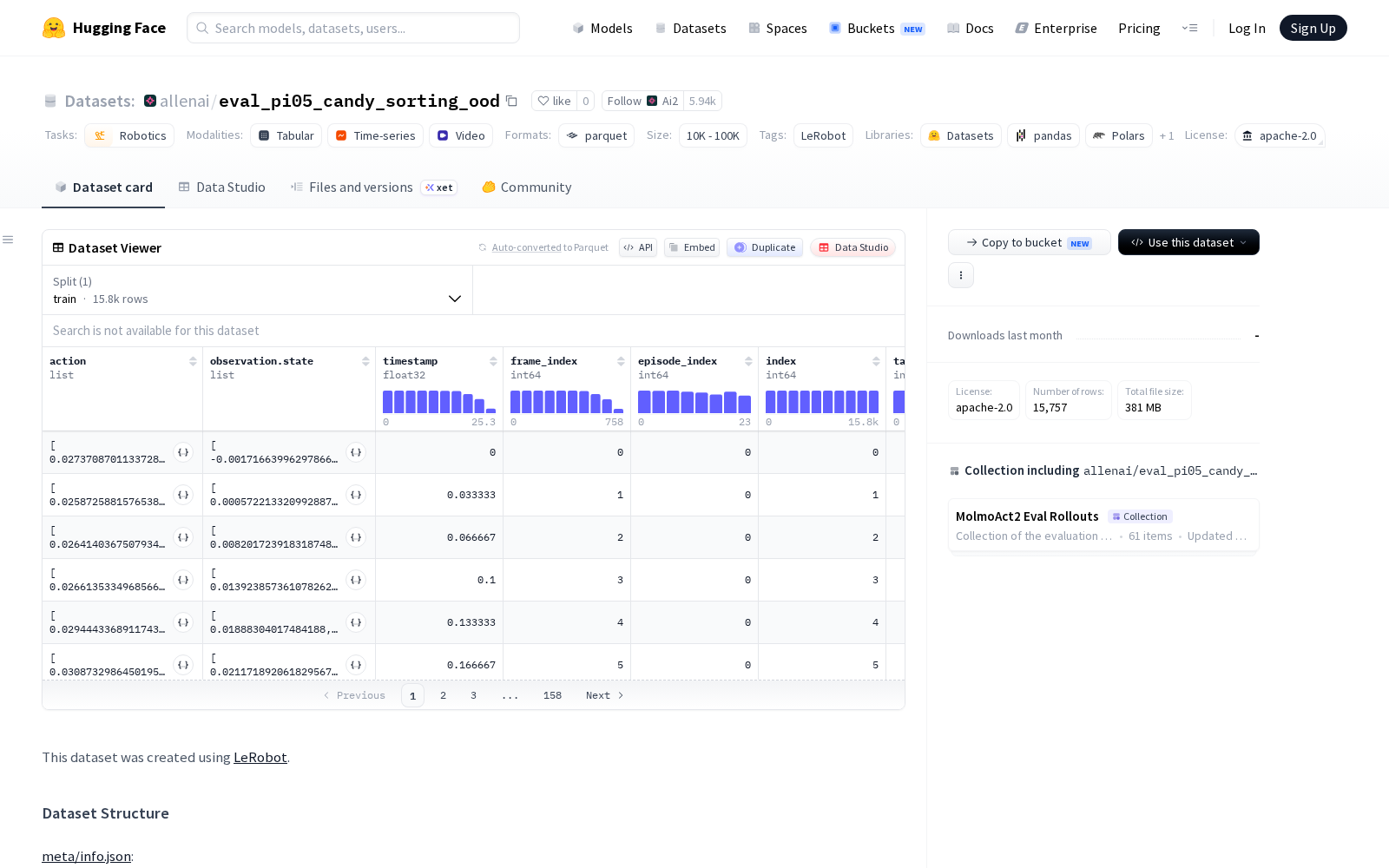
该数据集基于LeRobot工具构建,采用对商业应用友好的Apache-2.0开源许可证,学术机构、企业研发团队均可免费使用并进行二次开发。其核心内容为"bi_yam_follower"双机械臂的糖果分拣任务演示数据,设计初衷就是为模仿学习、视觉运动策略学习、跨分布泛化测试等前沿研究提供标准化的训练与评估基准。
数据维度方面,eval_pi05_candy_sorting_ood共包含24条完整操作轨迹(episodes),累计15757个时间步(帧),覆盖4种不同的分拣任务设定。整体采用多模态结构组织:1) 动作空间:涵盖左右机械臂各6个关节的位置指令、以及左右夹爪的位置指令,共计14维浮点数向量,可精准还原机械臂操作的全链路动作逻辑;2) 观测空间:除了对应动作空间的14维机械臂关节状态数据外,还同步收录了右、左、顶三个固定视角的RGB视频流,单帧分辨率为360x640,采用30fps帧率录制、AV1编码,可模拟不同部署位置的工业视觉设备采集的真实画面。此外,数据集还配套了时间戳、帧索引、轨迹索引、任务索引等完整元数据,采用分块Parquet文件格式存储,同时配有独立的MP4视频文件,方便研发团队按需调用不同模态的数据。
从应用价值来看,该数据集可广泛用于训练和评估基于视觉的双机械臂控制模型,除了基础的糖果分拣任务外,其多模态、跨场景的设计还可支撑工业小零件分拣、食品加工物料分类、实验室精密组装等多个场景的具身智能模型研发,尤其是其OOD(跨分布)的数据集设定,可有效测试模型在未见过的物料形态、摆放位置、光照环境下的操作准确率,更贴近真实生产环境的需求,对降低具身智能研发门槛、推动双机械臂技术落地具有重要意义。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)