

当前全球具身智能产业正处于技术迭代关键期,机器人的复杂环境操作能力、非结构化场景适应能力是制约其商业化落地的核心瓶颈,而高质量的多维度标注训练数据是算法迭代的核心基础。此前行业内面向第一视角空间提示的轨迹预测类数据集存量较少,且普遍存在标注维度单一、场景覆盖不足、泛化性验证难度大等痛点,EgoSPT数据集的发布正是针对这一行业需求。
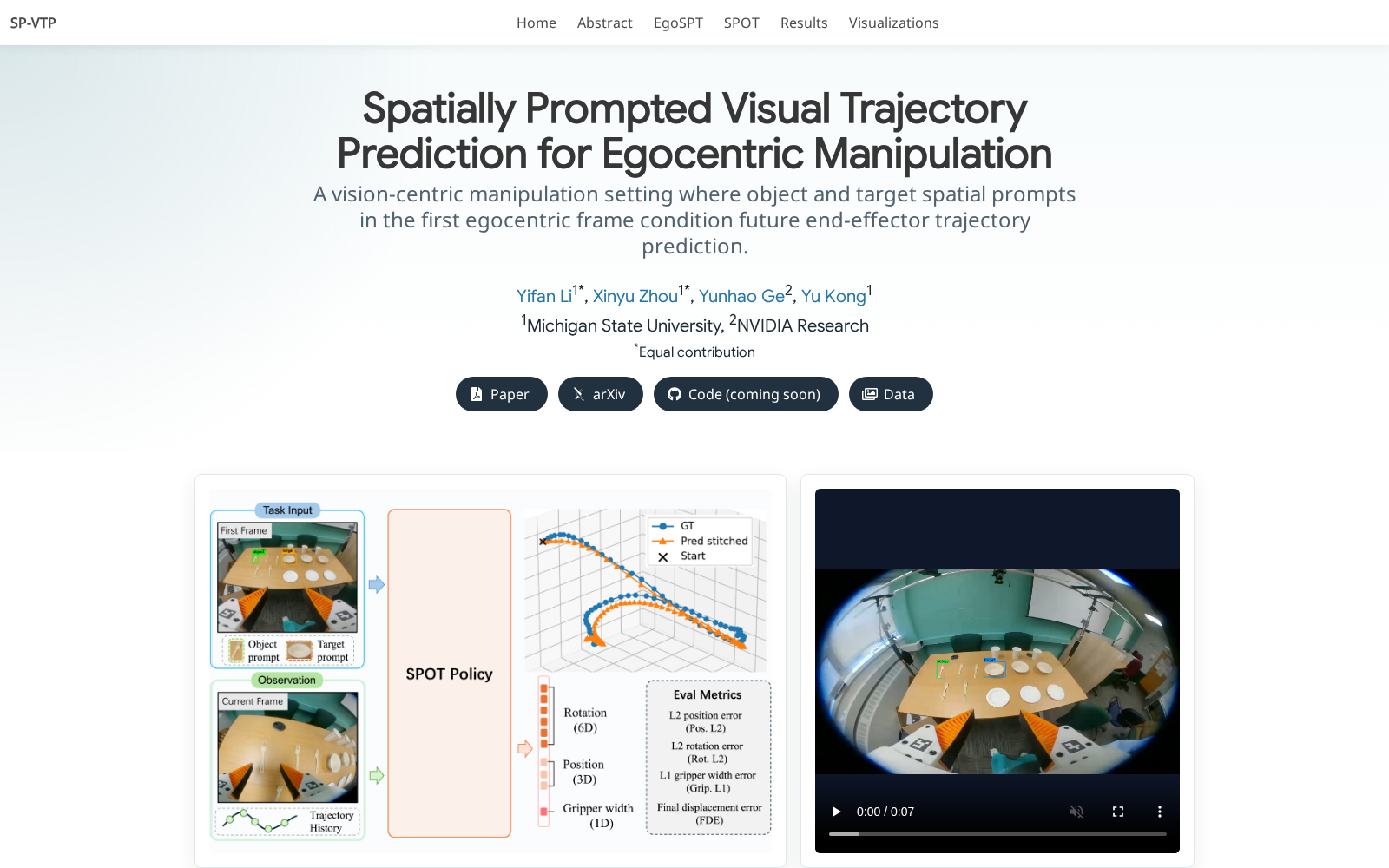
密歇根州立大学本次发布的数据集EgoSPT,是由该校与英伟达研究院联合创建的具身智能空间提示操作数据集,核心研究方向为基于首帧空间提示的视觉轨迹预测问题,于2026年5月20日首发于学术预印本平台arXiv。该数据集包含2841个抓放操作视频,每个视频约5秒时长并降采样至10fps,通过改进的通用操作接口采集,整合了GoPro鱼眼镜头拍摄的第一视角操作视频,与iPhone SLAM系统恢复的6自由度末端执行器轨迹数据,标注维度覆盖视觉输入、空间位置、运动路径等多个核心层。
据披露,EgoSPT的数据构建过程由九名行业专家完成,场景设计覆盖五个视觉相似叉子与九类目标容器的组合,同时设置三个渐进式场景以评估模型分布内性能与跨场景泛化能力,有效解决了同类数据集泛化性验证标准不统一的问题。该数据集主要应用于机器人操作策略学习领域,通过提供首帧物体与目标的空间标注、自我中心视觉观察和精确运动轨迹,可支撑算法解决在杂乱环境中基于稀疏空间意图生成时序运动规划的核心挑战。
从应用落地维度来看,EgoSPT数据集的标注框架和数据结构未来可支撑多个领域的技术研发:在家用服务机器人场景中,可用于训练餐具收纳、物品整理等日常操作策略,降低机器人对连续指令的依赖,仅需明确初始物体与目标位置即可生成完整运动路径;在工业智能制造场景中,可支撑分拣机器人、装配机器人的算法训练,提升其在外观相似零部件、多目标容器场景下的操作准确率;此外,该数据集的6自由度轨迹标注还可为人形机器人上肢精细操作、自动驾驶车辆的动态轨迹预判等研究提供数据支撑。作为学界与产业界联合产出的专业数据集,EgoSPT的发布不仅填补了细分领域的训练数据缺口,也为具身智能算法的跨场景泛化能力验证提供了标准化的测试基准,对于推动全球具身智能技术的研发落地、加速机器人操作类算法的迭代效率具有重要的支撑作用。
详情页内容:



_1769672084863.jpg)