

当前人形机器人、工业协作机器人正进入技术落地的关键周期,机器人模仿学习、策略优化等算法研发高度依赖高质量的实机操作标注数据,但受限于硬件成本、采集门槛,中小型研究团队往往难以获取足量的标准化训练数据,优质公开数据集已成为机器人学领域的核心公共研发资源。作为全球前沿AI研究领域的核心非营利机构,艾伦人工智能研究所(Allen Institute for AI)长期面向全球研究者开源共享技术成果,覆盖大模型、机器人学、生物AI等多个前沿方向,此次发布的数据集正是其在机器人学习领域的最新公开产出。
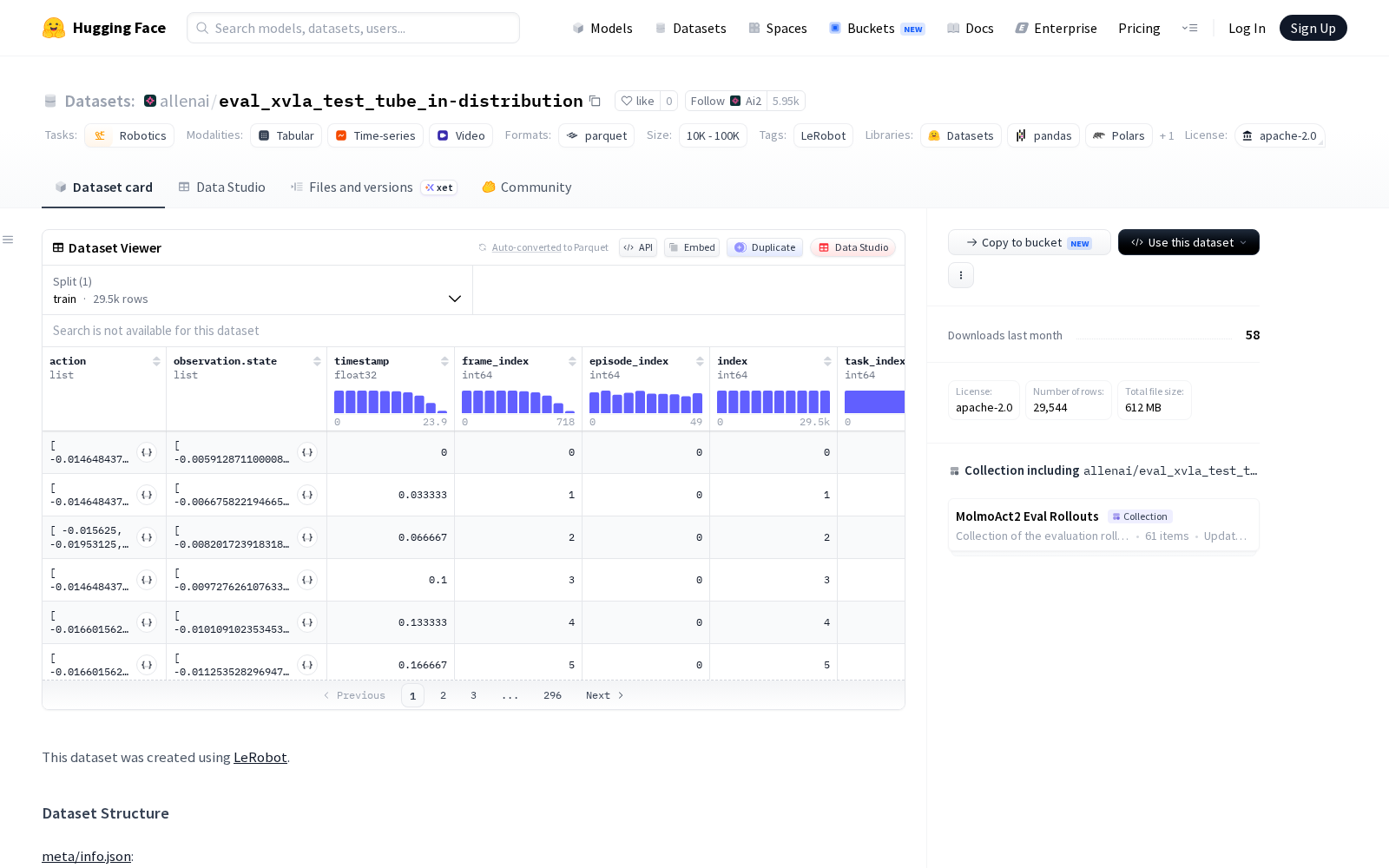
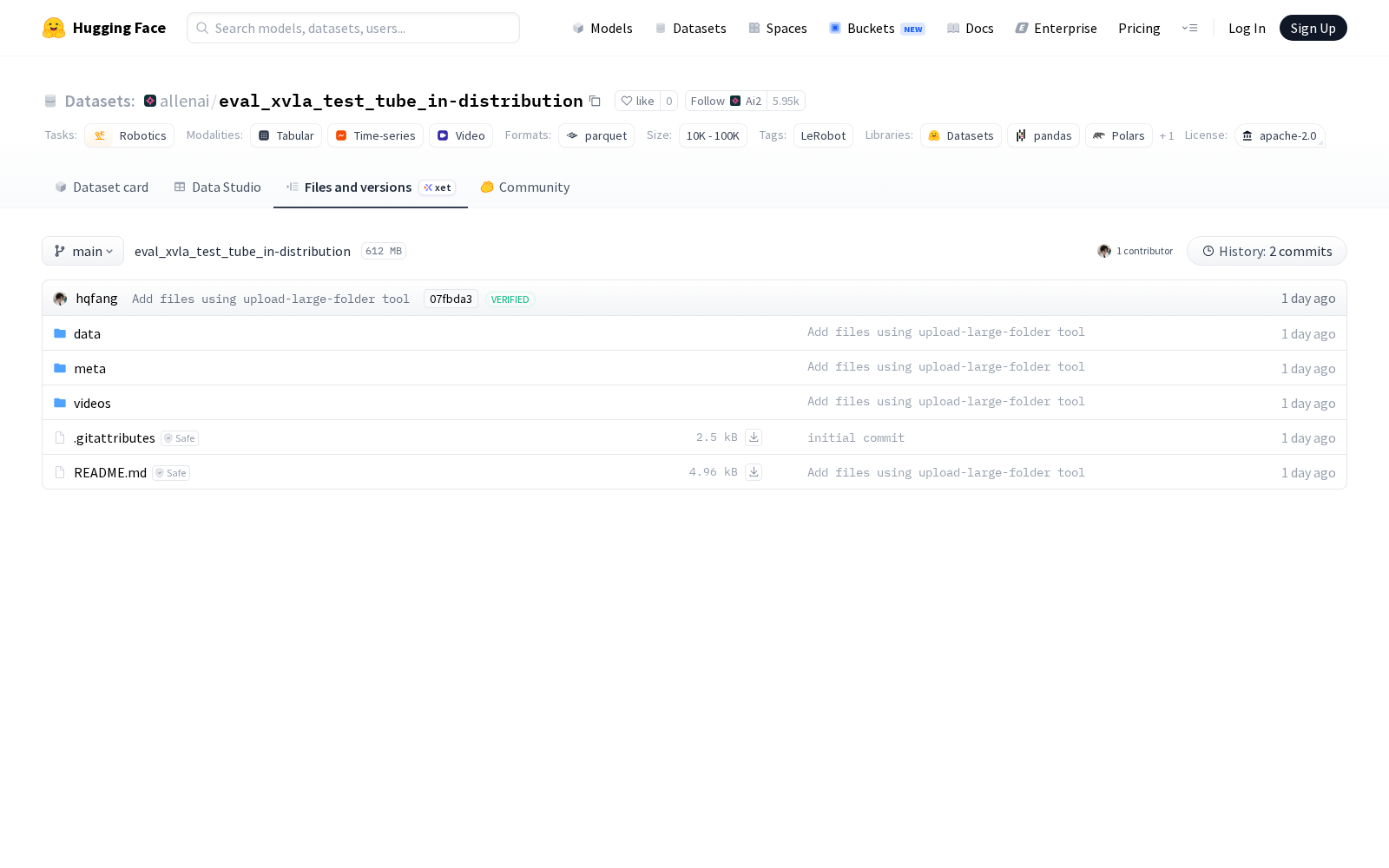
Allen Institute for AI本次发布的数据集eval_xvla_test_tube_in-distribution,是面向机器人学领域的专业训练数据集,使用当前主流的开源机器人学习工具栈LeRobot创建,数据兼容性强,可直接适配绝大多数主流机器人模仿学习训练框架,大幅降低研究者的数据适配成本。数据集记录了型号为bi_yam_follower的双臂机器人操作数据,旨在为机器人控制与模仿学习任务提供标准化训练基准。数据内容包含50个完整的任务片段(episodes),总计29544个时间步(帧),覆盖了双臂协作操作的典型动作序列。每个数据点包含机器人的动作指令、状态观测以及多视角视觉观测,可满足多模态视觉-动作融合模型的训练需求。具体而言,动作空间和状态空间均为14维浮点数向量,分别对应左机械臂的6个关节位置和1个夹爪位置,以及右机械臂的对应7个位置,可支撑精细操作控制算法的训练需求。视觉观测包含三个固定视角(右、左、顶)的RGB视频流,每帧图像分辨率为360x640,视频帧率为30fps,可帮助模型学习不同角度的操作特征,提升泛化能力。此外,数据还包含时间戳、帧索引、片段索引等元数据,方便研究者按需拆分、调用数据。数据集以高效存储结构化数据的Parquet文件格式存储控制数据,以通用的MP4格式存储视频,总体结构化数据量约为100MB,视频文件量约为200MB,下载门槛低,适合中小团队快速开展验证实验。该数据集除了可支撑机器人模仿学习、策略学习、行为克隆等基础研究任务外,还可应用于工业双臂装配操作算法训练、人形机器人上肢操作策略开发、多臂协同安全控制算法验证等多个场景,为相关技术的快速迭代提供基准测试数据支撑。
查看eval_xvla_test_tube_in-distribution
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)