

作为当前机器人落地的核心技术路径之一,模仿学习可大幅降低机器人精细化操作的训练门槛,然而垂直场景下高质量标注数据的缺失,一直是制约细分领域机器人商业化落地的核心瓶颈,其中实验室高频的移液器操作场景,此前就缺乏统一标注标准的专用机器人训练数据集。近日,艾伦人工智能研究院(Allen Institute for AI)正式发布eval_pi05_pipette_in-distribution数据集,为该领域的技术研发提供了重要的基础数据支撑。
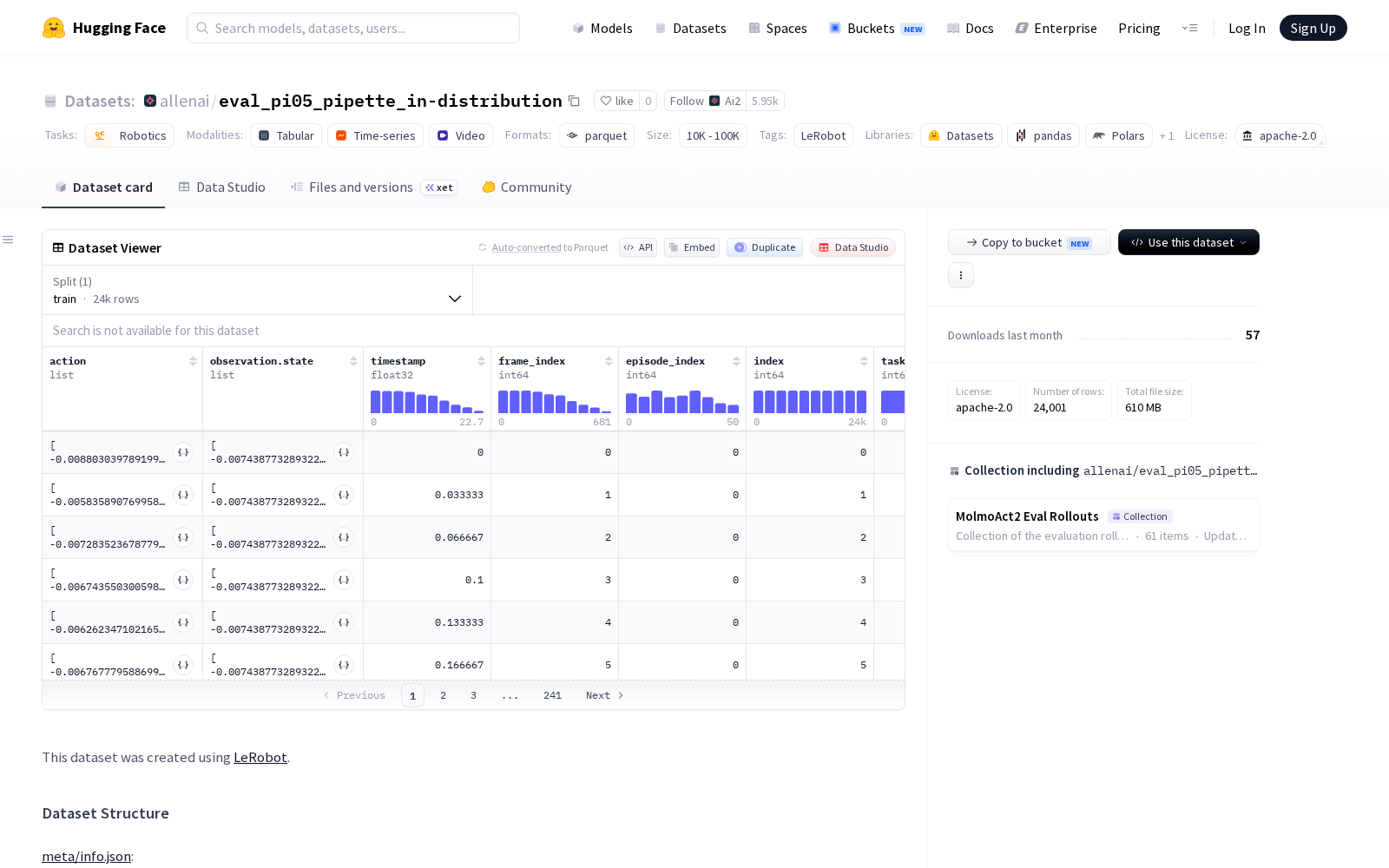
该数据集基于LeRobot框架创建,是专门面向机器人控制、模仿学习等任务打造的垂直领域数据集,共包含51个完整操作episode,总计24001帧标注数据,仅覆盖移液器操作1类核心任务。数据以分块parquet文件形式组织,总数据文件大小约100 MB,配套视频文件大小约200 MB,采用Apache 2.0开源许可证,仅提供训练集划分,全球开发者可免费获取用于非商用或商用研发。
从标注维度来看,该数据集实现了机器人操作全链路数据的结构化标注:动作维度采用14维浮点数组,精准记录左右机械臂各6个关节及夹爪的位置参数;状态观测维度同步提供与动作对应的14维关节位置数据,可用于模型训练过程中的动作对齐校验;图像观测维度同步覆盖右、左、顶三个视角的同步视频流,分辨率为360x640 RGB三通道,帧率30fps并采用AV1高效编码,在控制数据体量的同时完整还原了操作场景的空间位置关系。此外数据集还配套了时间戳、帧索引、episode索引、全局索引和任务索引等结构化标签,方便开发者快速调用不同维度的训练数据。
从应用价值来看,该数据集可直接用于移液器操作机器人的模仿学习训练,科研团队可基于该数据集训练机器人完成不同剂量的移液、分液、加样等高频实验室操作,大幅降低机器人从零开始训练的试错成本,减少实验室珍贵样本的损耗;也可延伸用于医疗检测、生物制药等场景下的小剂量液体操作机器人的预训练,提升机器人操作的精度与稳定性;此外该数据集的多视角标注+动作-状态对齐的标注体系,也可为其他精细化工业操作机器人的数据集构建提供参考范式。
随着全球数据要素市场向垂直细分领域深耕,专用场景的高质量标注数据集已经成为AI技术落地的核心生产要素,此次艾伦人工智能研究院发布的该款专用数据集,填补了移液器操作场景下机器人模仿学习训练数据的空白,对于推动实验室无人化、科研数字化转型具有重要的支撑作用,也为全球AI科研机构开放共享垂直领域高质量数据集提供了参考样本。
查看eval_pi05_pipette_in-distribution
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)