

近年来,家用服务机器人赛道迎来高速增长,但衣物整理、烹饪等复杂非结构化家务场景的落地进度始终滞后,核心瓶颈之一就在于高标注质量的场景化操作训练数据稀缺——不同于工业场景的刚性标准工件,衣物等家用物品的材质、形态、状态高度多变,对机器人的感知、决策和操作能力要求极高,而此前行业内适配通用格式的同类专项数据集供给十分有限。
HuggingFace推出的LeRobot是当前全球机器人研发领域的主流通用数据集标准,通过统一传感器数据、动作标注、环境参数等字段规范,解决了不同团队采集的数据集格式不兼容、复用成本高的痛点,大幅降低了机器人研发团队的训练数据预处理门槛。
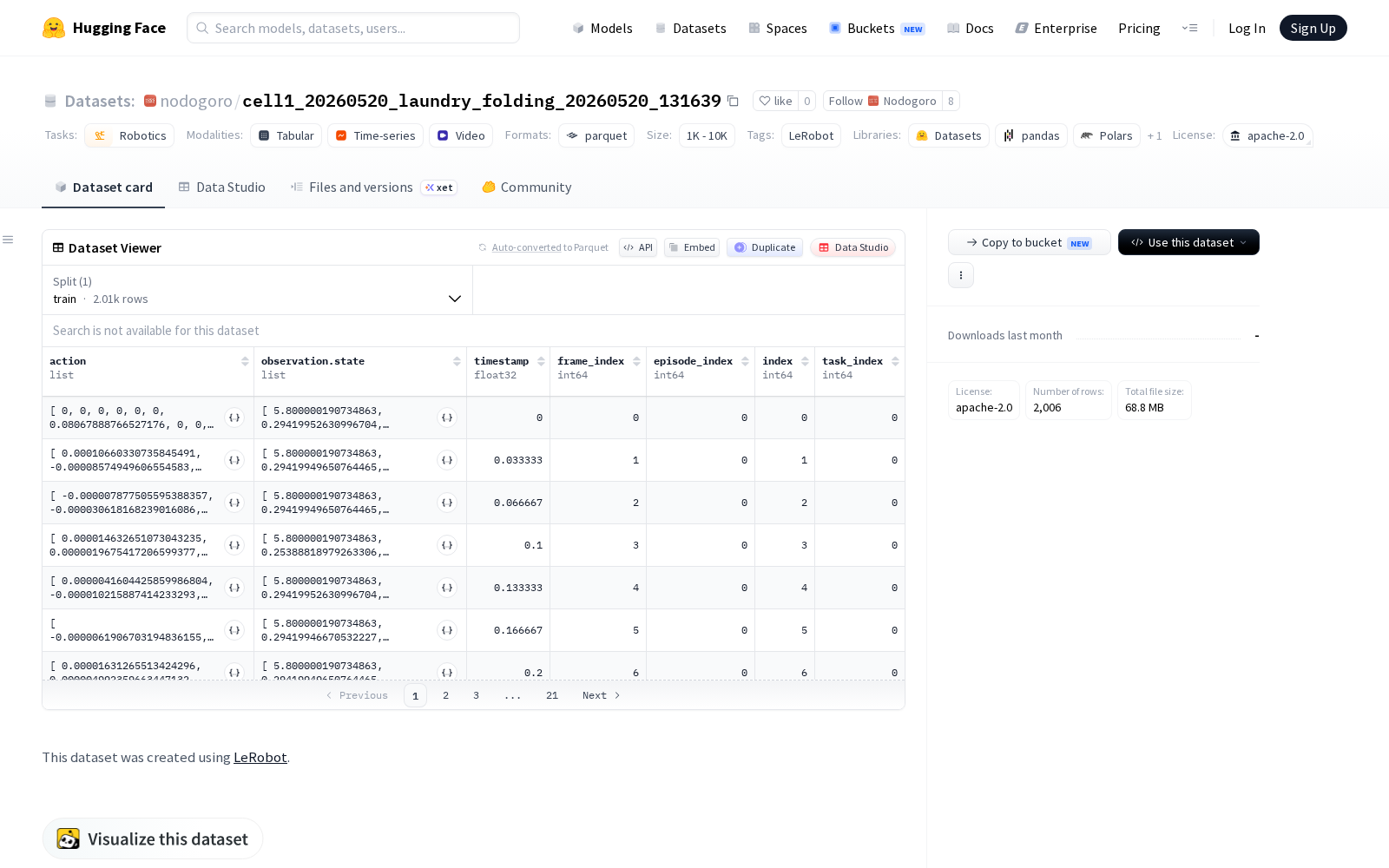
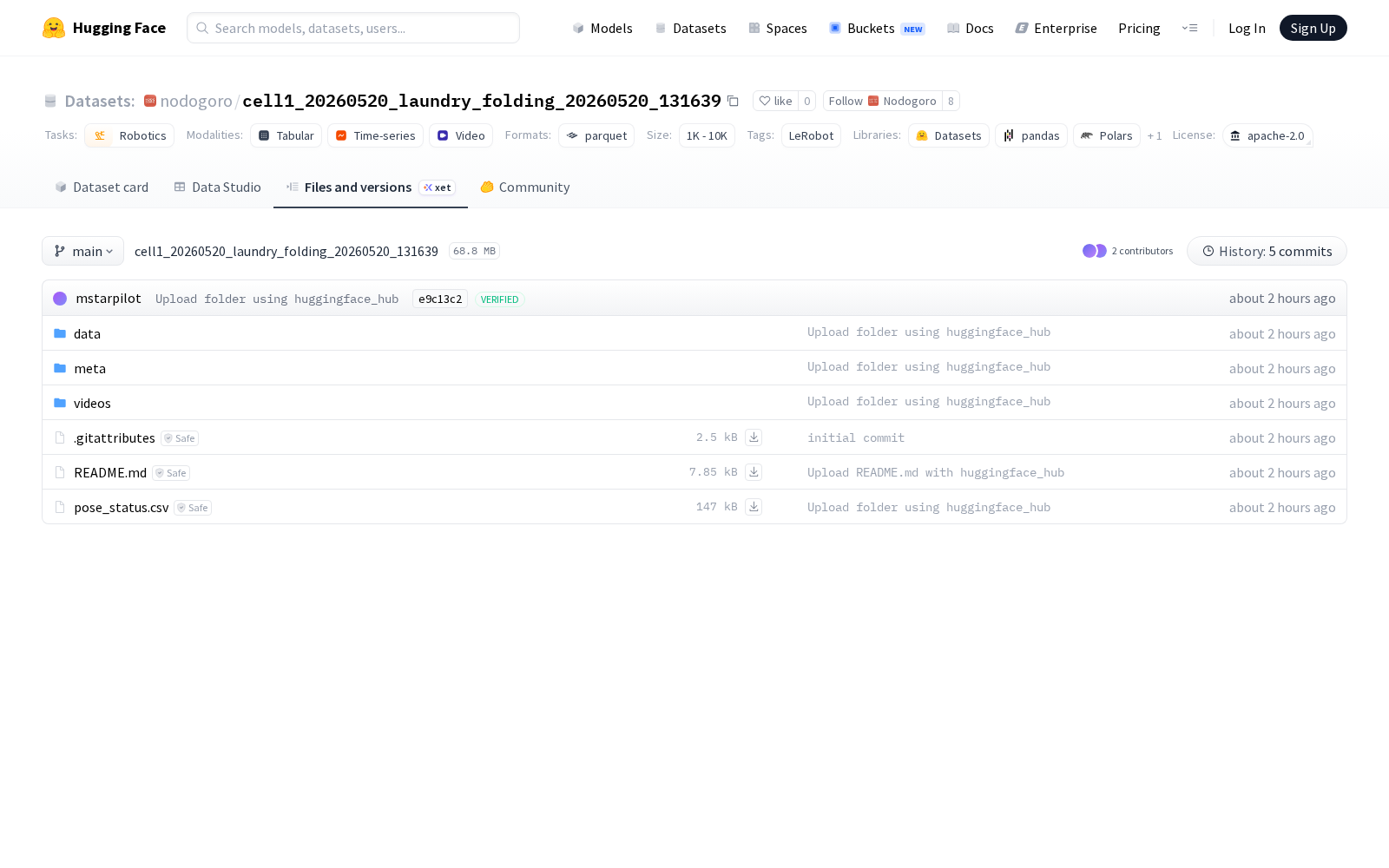
nodogoro本次发布的数据集cell1_20260520_laundry_folding_20260520_131639,该数据集为HuggingFace LeRobot格式机器人数据集,于2026年5月21日率先在HuggingFace平台上线,核心覆盖机器人操作学习、家务任务执行两大应用方向。
查看cell1_20260520_laundry_folding_20260520_131639
Dataset card内容:
Files and versions内容:
从应用价值来看,该衣物折叠场景专项数据集可被用于训练服务机器人的非刚性物体感知、操作力度动态调整、折叠路径规划、异常状态(如衣物缠绕、滑落)应对等核心能力,后续可落地的典型场景包括家庭日常衣物整理、连锁洗衣门店的自动化衣物分拣折叠、养老助残机构的辅助家务服务等多个民用服务领域,能够有效降低相关研发团队的数据集采集和标注成本,缩短机器人相关技能的训练迭代周期。
随着数据要素市场建设的持续推进,场景化高质量训练数据已经成为人工智能、机器人等前沿领域的核心生产资料。本次nodogoro发布的专项数据集,既填补了家务操作细分领域的通用格式数据集供给缺口,也为后续更多细分场景的机器人数据集开放共享提供了参考范式,对于推动家用服务机器人的技术迭代和商业化落地,加速服务机器人进入普通家庭的进程具有重要的产业价值。



_1769672084863.jpg)