

当前全球机器人产业正处于技术迭代与场景落地的关键周期,无论是工业协作机器人、服务跟随机器人还是人形机器人,多模态感知、自主决策、精准控制类算法的研发,都高度依赖与硬件匹配的高质量真实场景数据集。作为人工智能领域主流的开源数据集托管平台,HuggingFace近年来也成为机器人领域开源数据集的重要发布阵地,而LeRobot作为开源机器人数据集构建框架,因标准化程度高、适配多种机器人硬件的特性,被全球机器人开发者广泛使用。
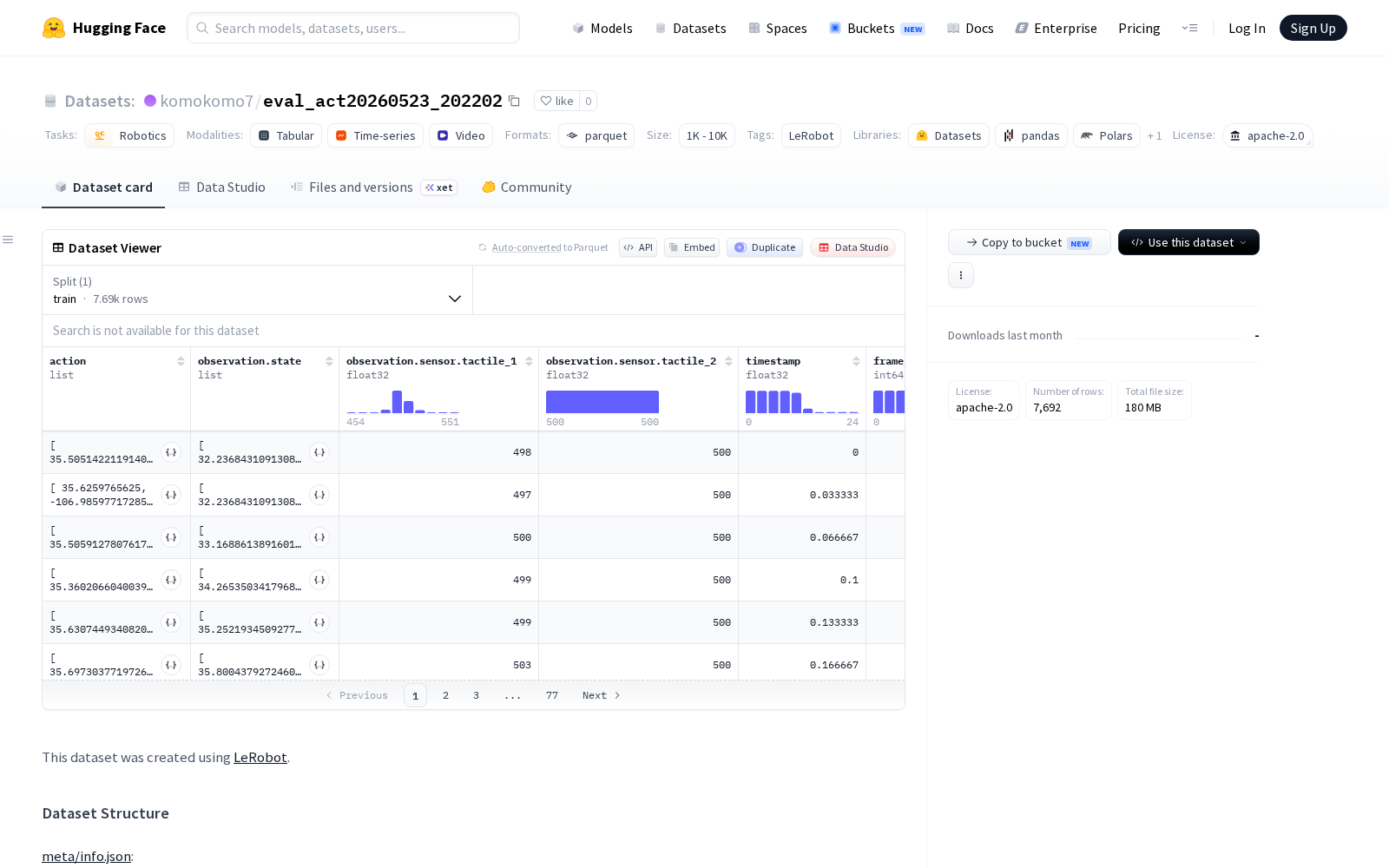
近日,开发者komokomo7正式在HuggingFace平台首发专用机器人数据集eval_act20260523_202202,该数据集基于LeRobot框架创建,专为Cranex7跟随者机器人量身打造,填补了该型号机器人专用训练数据集的市场空白,为相关领域的开发者提供了标准化的基础数据支撑。
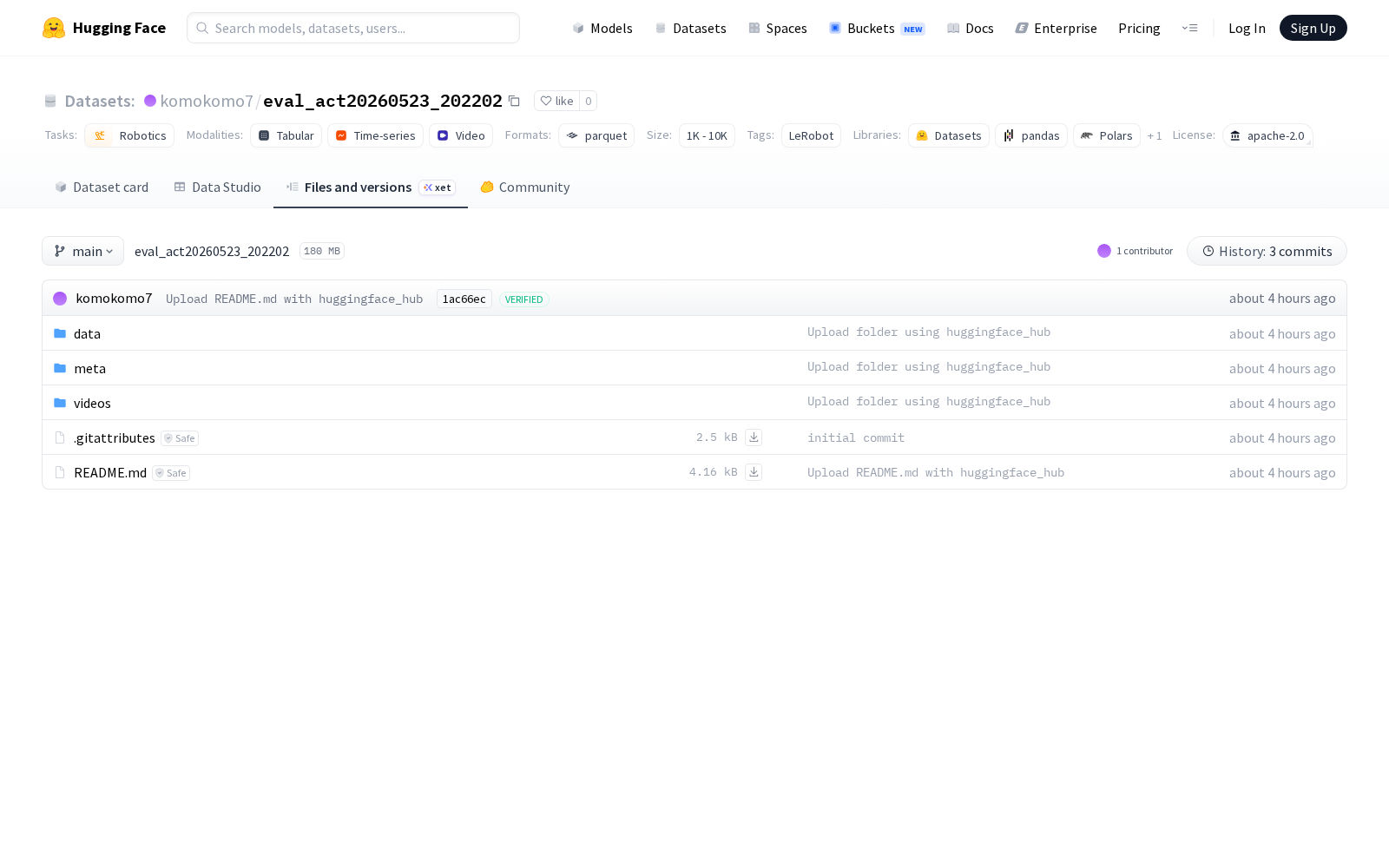
据公开信息显示,该数据集共包含20个任务场景episode,总计7692帧有效数据,采样帧率为30fps,数据分为结构化数据与视频数据两类,其中结构化数据以parquet格式存储,总大小约为100MB,配套视频数据以mp4格式存储,总大小约为500MB,当前公开的数据集仅包含训练集。
从数据维度来看,该数据集覆盖了机器人运行全链路的多模态特征:动作与观测状态维度各包含8个浮点数,分别对应机器人关节位置和夹爪位置,可直接用于机器人动作模仿、轨迹规划、控制精度优化等算法的训练;两路触觉传感器各输出1个浮点数数据,可支撑机器人抓取力度调节、物体材质识别、接触状态判断等场景的算法研发;顶部与手腕双路480x640分辨率的RGB摄像头数据,同时覆盖全局环境感知与末端操作近距离感知两类需求,可用于多模态感知融合、视觉伺服控制、动态障碍物识别等方向的算法训练。除此之外,数据集还配套了时间戳、帧索引、episode索引、任务索引等完整元数据,方便开发者根据研发需求快速调用对应场景的数据。
从应用方向来看,该数据集可广泛适配机器人控制、多模态感知、强化学习等多个研发场景:对于Cranex7跟随机器人的二次开发者而言,可直接基于该数据集训练物品抓取、动态跟随、避障绕行等基础功能,大幅减少自行采集标注数据的成本;对于通用机器人算法开发者而言,该数据集的多模态数据特征可用于验证多源数据融合感知算法的鲁棒性,对比单一视觉输入的算法,融合关节状态、触觉、视觉的多模态输入可显著提升机器人在光线复杂、非结构化场景下的操作稳定性;此外,该数据集体量适中,中小开发者无需配置大算力资源即可完成算法训练与测试,有效降低了机器人领域的研发门槛。
作为机器人领域细分场景的专用数据集,本次eval_act20260523_202202的开放,是开源机器人数据生态的重要补充,也契合当前数据要素向垂直领域下沉、支撑实体产业数字化创新的发展趋势,将进一步推动机器人领域的开源创新,加速相关技术的落地普及。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)