

当前,具身智能与协作机器人产业正处于快速落地期,机器人操作学习、轨迹控制等核心技术的研发高度依赖高质量标注数据,而实体机器人数据采集成本高、场景覆盖有限的痛点,正在制约行业研发效率。作为当前主流的高保真机器人仿真环境,Isaac Lab生成的标准化数据集已成为行业重要的数据供给来源;而HuggingFace推出的LeRobot格式,是机器人领域应用最广泛的通用数据集标准之一,通过统一数据结构、标注规范,可实现不同算法框架、研发平台之间的无缝适配,大幅降低研发团队的数据预处理成本。
eunyoung927本次发布的数据集isaaclab-franka-cube-patch-ee-delta-scripted,该数据集为HuggingFace LeRobot格式机器人数据集,于2026年5月23日首发上线,核心面向机器人操作学习、机械臂轨迹控制研发需求。
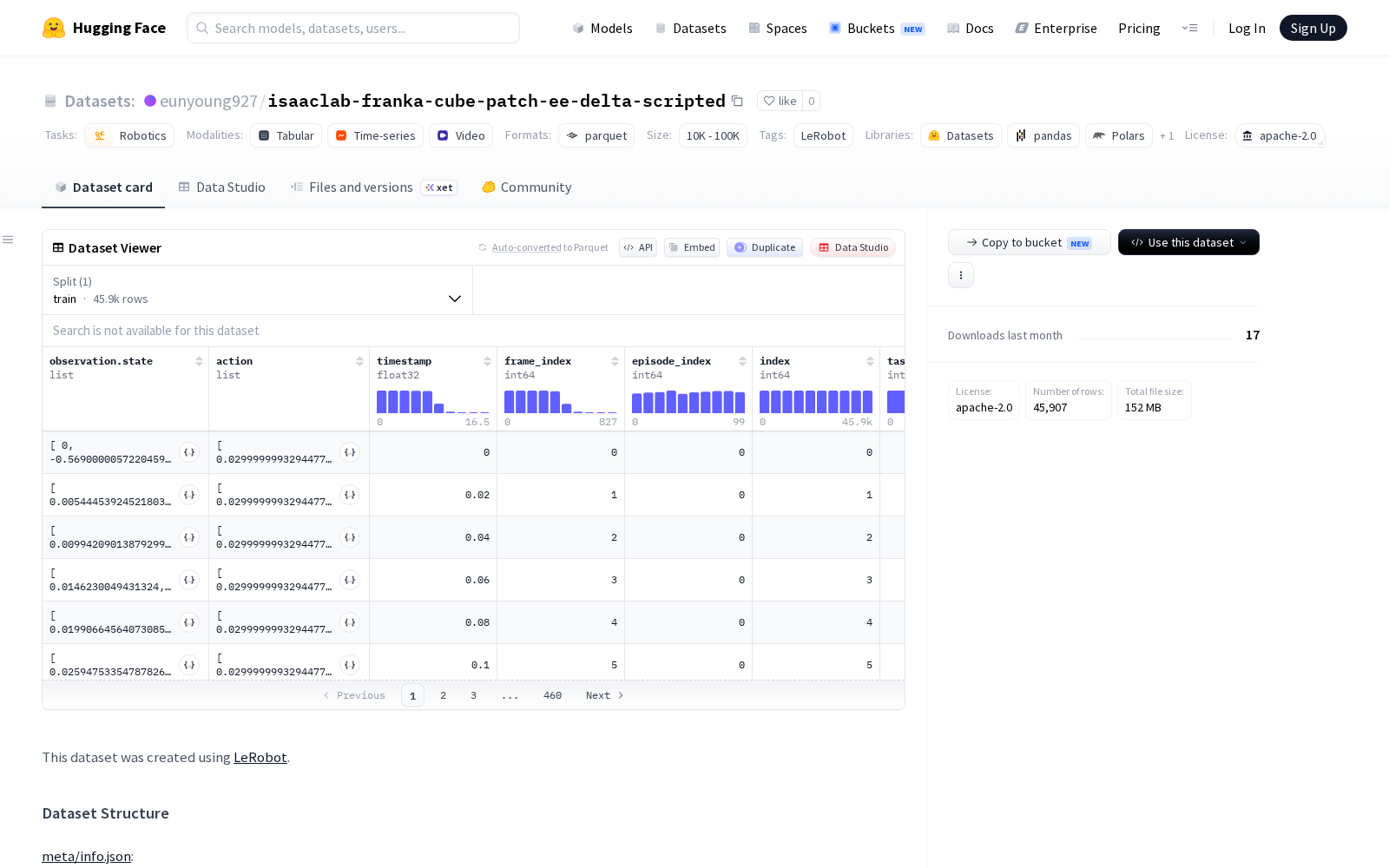
查看isaaclab-franka-cube-patch-ee-delta-scripted
Dataset card内容:
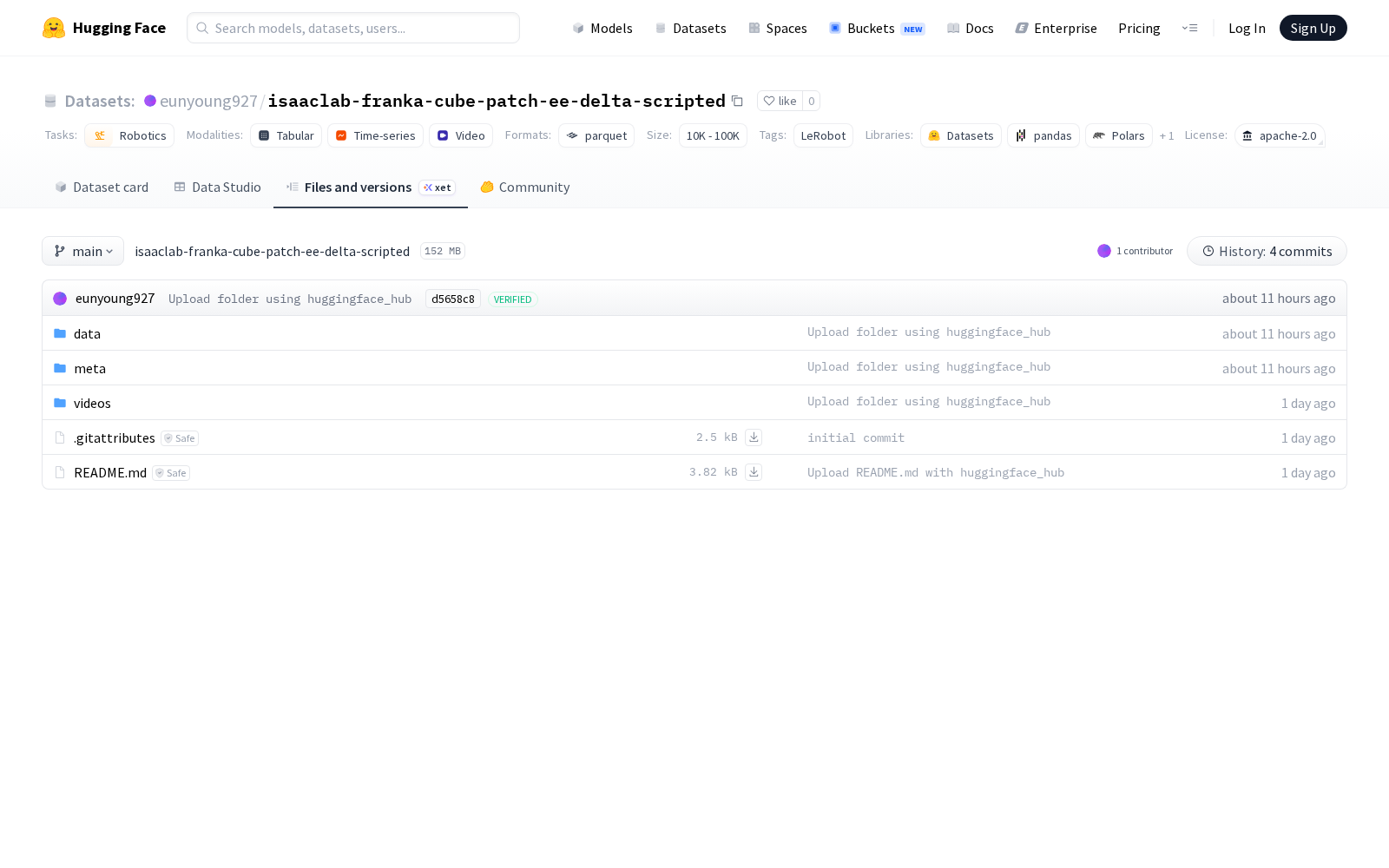
Files and versions内容:
从应用价值来看,该数据集针对Franka系列协作机器人的方块操作场景生成,核心覆盖末端执行器位姿偏移控制、脚本化操作轨迹等维度的标注数据,可支撑多个机器人研发方向的技术探索:一是可用于机械臂模仿学习算法的训练,研发团队可基于脚本化的标准操作轨迹,快速训练机器人完成方块抓取、摆放等基础操作,大幅降低实体机器人试错带来的时间与硬件成本;二是可用于末端执行器的位姿控制、力控算法的验证,基于仿真环境下的精准标注数据,研发人员可快速迭代轨迹控制算法的精度与稳定性;三是可支撑Sim2Real(仿真到实体迁移)相关技术的研发,作为衔接仿真训练与实体机器人落地的中间数据载体,降低不同场景下的模型适配难度;四是可为工业分拣、小部件装配等典型协作机器人应用场景的算法研发提供预训练数据支撑。
本次数据集的发布,进一步丰富了LeRobot生态下的工业机器人操作类数据资源,对于推动机器人操作学习领域的技术开源、降低中小研发团队的准入门槛具有积极作用,也为数据要素在智能机器人产业的落地应用提供了典型样本。随着国内数据要素市场的逐步完善,面向垂直产业的专业化训练数据集,将成为支撑人工智能与实体产业融合落地的核心基础资源。



_1769672084863.jpg)