

当前全球机器人产业正处于技术落地的关键窗口期,控制算法精度、多任务适配能力是制约机器人从工业场景向泛服务场景渗透的核心瓶颈。而仿真训练凭借低试错成本、高场景复用性的优势,已经成为机器人领域研发的标配路径,但针对特定硬件型号、标注维度完备的开源仿真数据集仍较为稀缺,是不少中小研发团队的核心痛点。近日,开发者serdarbahar正式对外发布task_exp_simulation_dual_8数据集,该数据集由LeRobot创建,专门面向机器人学任务研发设计,核心适配xArm7机械臂的训练需求,目前已在HuggingFace平台首发上线。
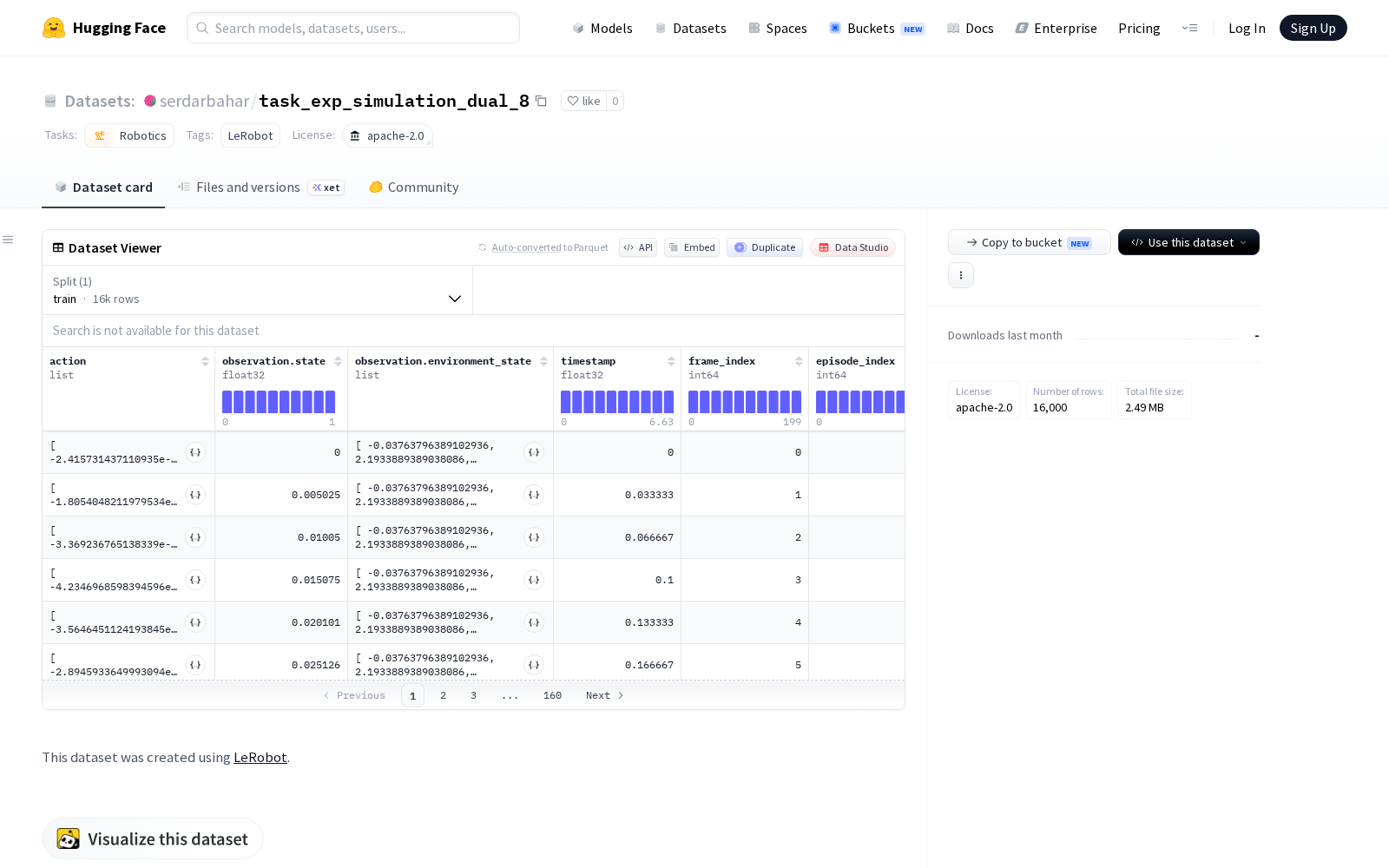
据公开信息显示,本次发布的数据集共包含80个完整任务周期(episodes),总计16000帧采样数据,采样帧率为每秒30帧,完整覆盖了机械臂完成标准任务的全流程动作序列。数据采用parquet格式存储,同时附带对应的原始视频文件,方便研发人员按需调用。数据集的标注维度覆盖了机器人训练的核心需求:动作维度包含16个浮点数,分别对应前向关节1-7、前向夹爪、逆向关节1-7和逆向夹爪的参数;观察状态维度包含1个表征任务进度的浮点数;环境状态维度包含76个浮点数,覆盖环境位置参数与缩减后的图像维度数据;此外还配套了时间戳、帧索引、episode索引、全局索引与任务索引等关联字段,方便研发人员做数据筛选与关联分析。值得注意的是,本次发布的所有数据仅开放训练分割权限,采用Apache-2.0开源许可,商业与非商业研发场景均可合规使用。
从应用方向来看,该数据集的适配性与标注完备性,可覆盖多个机器人研发场景的训练需求:针对工业机器人领域,可用于分拣、搬运、精密装配等场景的控制算法预训练,尤其是双方向动作参数的标注,可支撑逆向运动学优化、机械臂力控微调等细分方向的研发;针对任务学习领域,可用于少样本任务迁移、复杂工序拆解学习等模型的训练,降低机器人适配新场景的研发成本;结合环境状态中的图像维度数据,还可用于视觉引导的机器人控制算法训练,支撑机器人基于视觉感知自动调整动作姿态的相关研发。
作为面向特定硬件的开源仿真数据集,task_exp_simulation_dual_8的发布,进一步丰富了机器人领域的开源数据供给,有助于降低中小研发团队的训练数据获取门槛,加速机器人控制算法从仿真验证到实机部署的迭代效率,对推动机器人产业的技术普惠与多场景落地具备积极意义。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)