

随着人形机器人、服务机器人商业化落地进程加快,模仿学习作为机器人实现复杂场景操作的核心技术路线,对场景化、多模态的高质量训练数据集需求持续攀升。相较于通用AI数据集,机器人操作数据集需要同步覆盖视觉感知、动作状态、反馈奖励等多维度信息,采集门槛高、标准化难度大,已经成为制约中小机器人研发团队技术迭代的核心瓶颈之一。
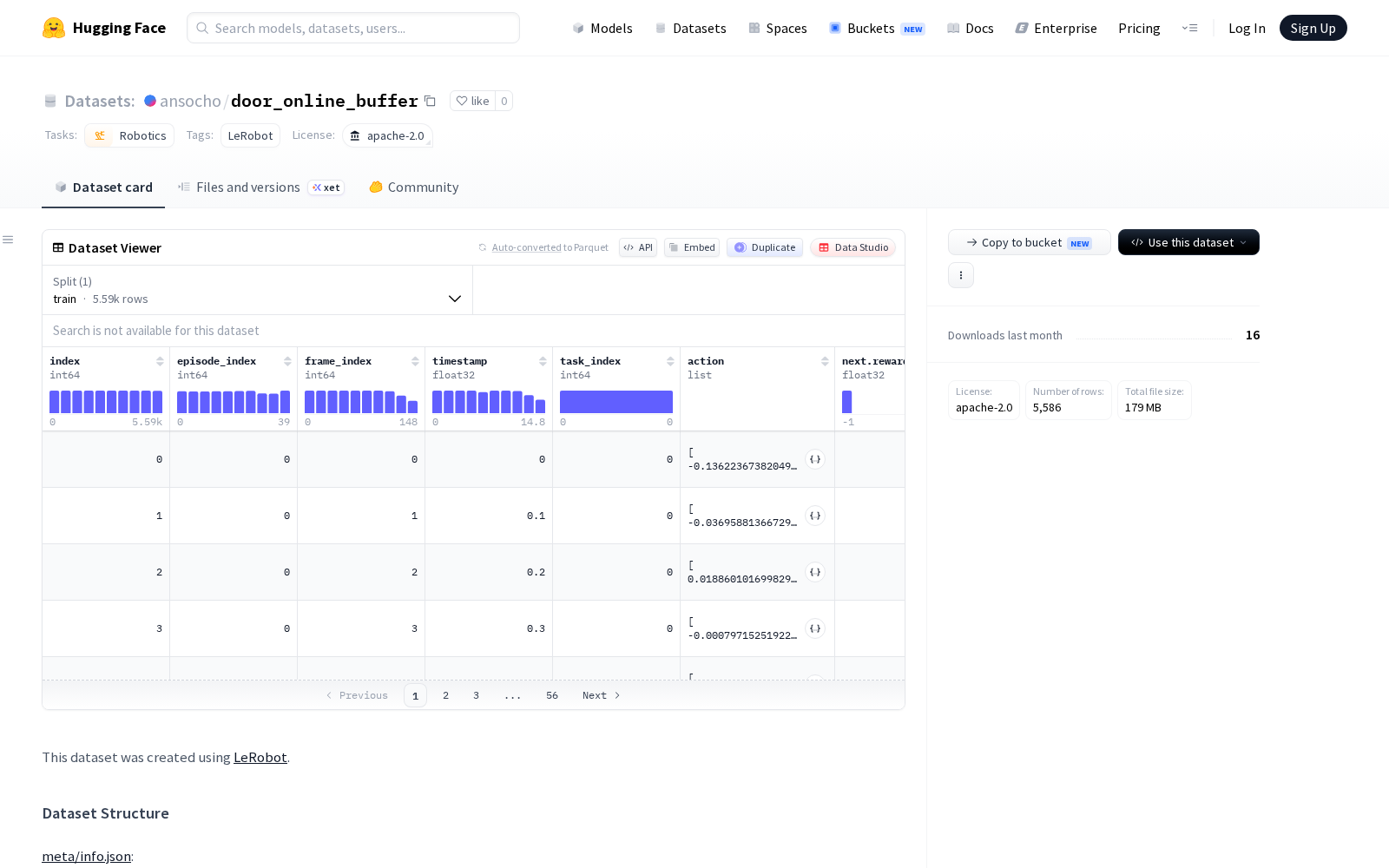
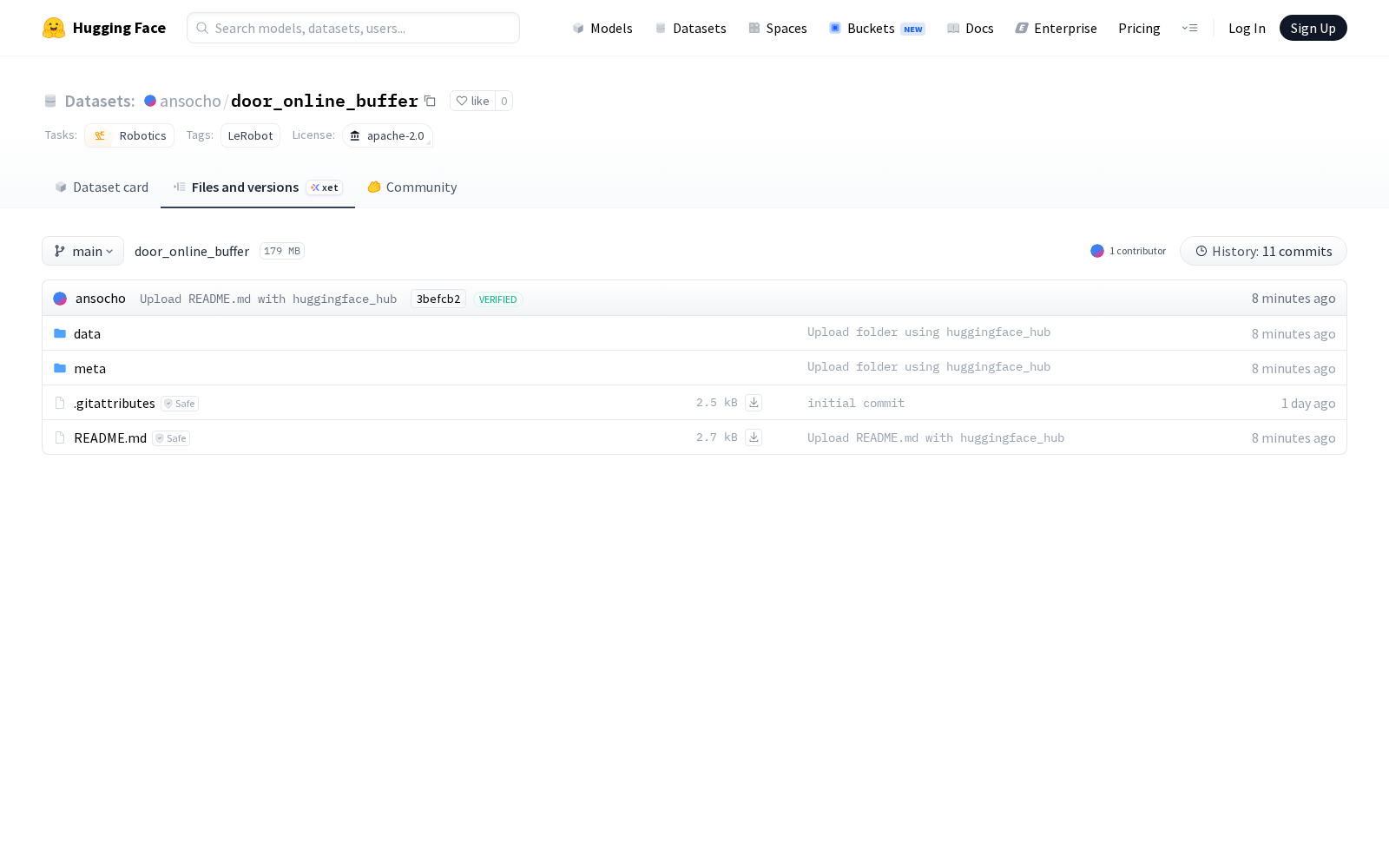
ansocho本次发布的数据集door_online_buffer,是专门针对机器人操作场景打造的标准化训练数据集,基于LeRobot框架创建,包含30个episodes和4242个frames,数据以parquet格式存储。数据集覆盖全链路多模态观测信息:包括两个摄像头(camera_0和camera_1)的3x128x128规格图像数据、8维浮点数格式的状态观测数据,以及7维动作、奖励和完成标志等核心标注特征。整组数据以10fps帧率采集,总数据文件大小为100MB,配套视频文件大小为200MB,可直接接入各类机器人模型训练流程。
从典型应用场景来看,该数据集可广泛适配多类机器人研发需求:一是可直接用于服务机器人、工业移动机器人的开门动作模仿训练,覆盖不同门体类型、不同操作力度下的动作反馈逻辑,提升机器人非结构化场景下的操作成功率;二是其搭载的双视角视觉数据+多维度状态观测数据,可用于机器人多模态感知融合算法的训练与优化,助力实现视觉感知与本体状态的精准匹配;三是可作为通用基准测试数据集,为不同厂商的机器人操控模型提供统一的评测标尺,降低行业横向对比的技术成本。
作为机器人领域的场景化专用数据集,door_online_buffer的开放不仅为相关研发团队提供了低成本的标准化训练数据支撑,也进一步丰富了全球机器人学习数据集的供给池,对推动多模态机器人技术落地、加速数据要素在人工智能实体化应用领域的流通复用具有积极作用。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)