

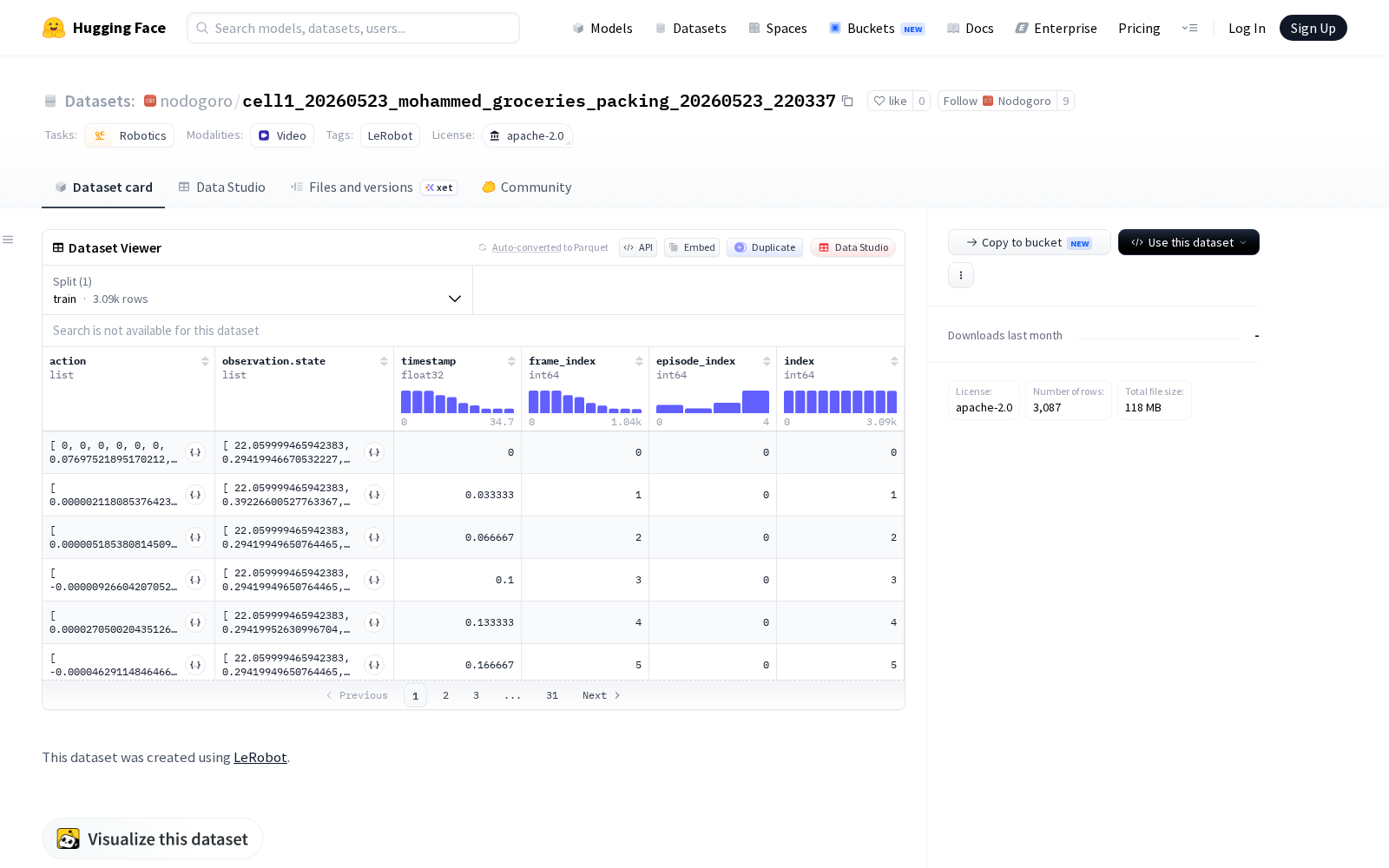
nodogoro本次发布的数据集cell1_20260523_mohammed_groceries_packing_20260523_220337,该数据集是一个机器人学数据集,使用LeRobot工具创建,专为机器人学习任务设计。数据集包含5个完整的情节(episodes),总计3087帧,涉及一个双机械臂系统(starpilot_yam_gripper机器人类型)。数据内容包括:机械臂动作(14维浮点数组,控制两个机械臂的位置、旋转和夹爪宽度)、状态观测(32维浮点数组,包括编码器角度、IMU加速度和角速度、机械臂位姿、夹爪开合状态等),以及多视角摄像头视频(RGB和深度图像),摄像头分别位于左腕、右腕和基座,视频分辨率为480x640或768x1024,帧率为30fps。数据集还包含时间戳、帧索引、情节索引等元数据,适用于机器人控制、视觉感知和强化学习等研究。数据集结构以Parquet文件格式存储,视频以MP4格式存储,遵循Apache 2.0许可协议。
查看cell1_20260523_mohammed_groceries_packing_20260523_220337
Dataset card内容:
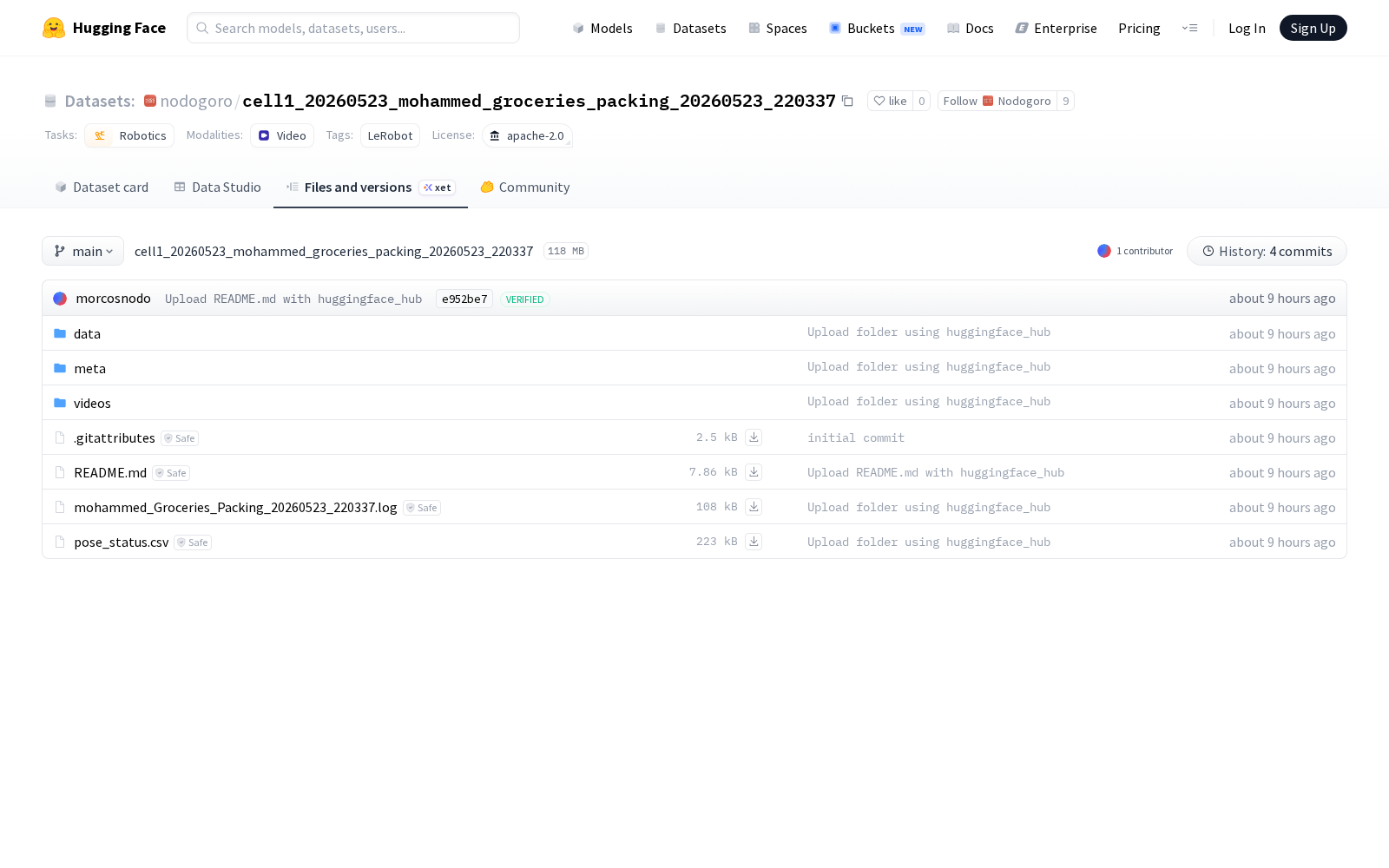
Files and versions内容:



_1769672084863.jpg)