

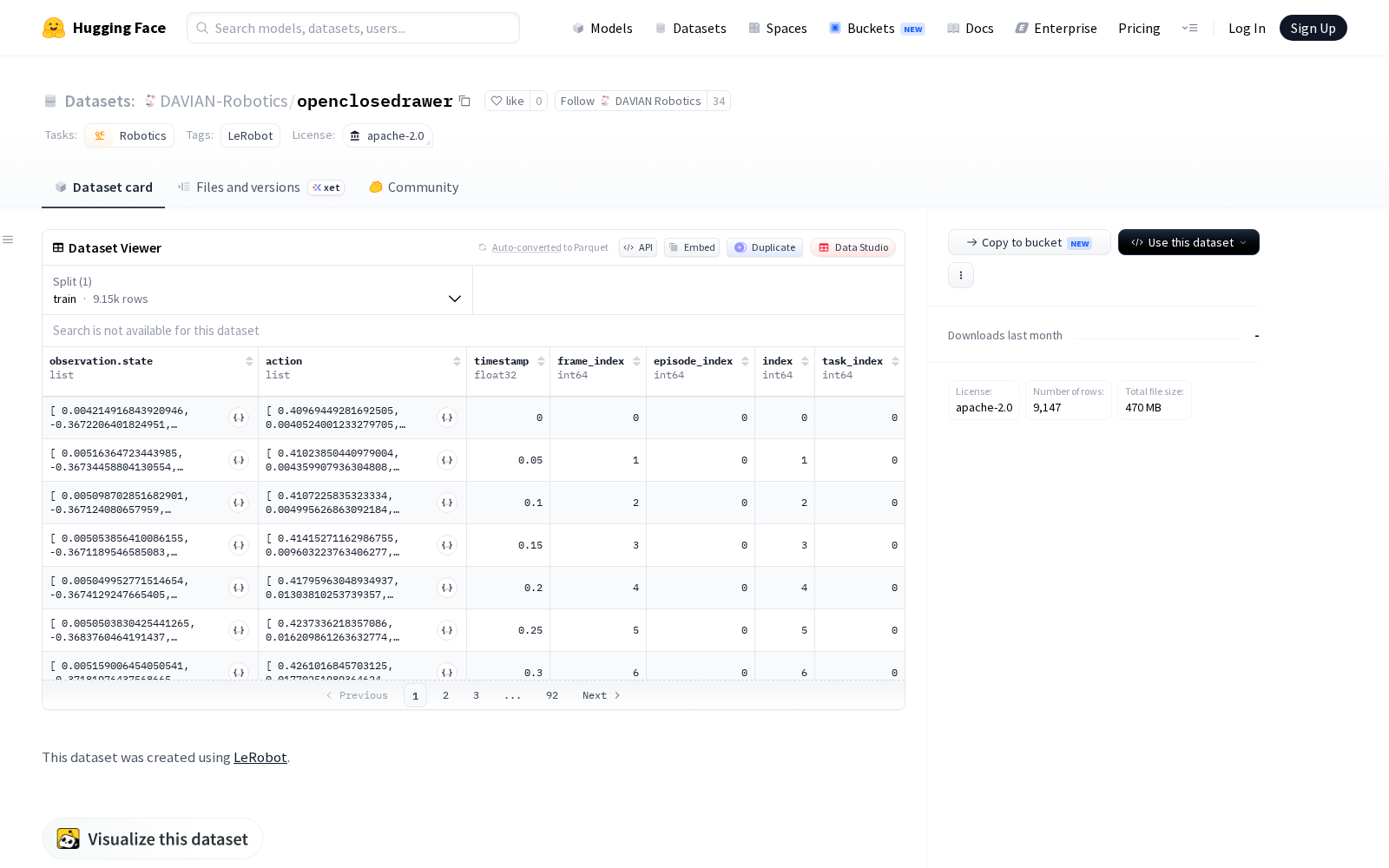
当前全球协作机器人、服务机器人及通用人形机器人产业正处于规模化落地的关键窗口期,面向细粒度日常操作的多模态训练数据缺失,是制约机器人视觉运动控制模型迭代、落地复杂场景的核心痛点之一。此前行业公开数据集大多集中于抓取、搬运等通用任务,针对抽屉开闭这类高频、高普适性的家居/工业操作场景的标准化数据集供给相对有限。DAVIAN-Robotics本次发布的数据集openclosedrawer,是面向特定操作场景的专用机器人学数据集,于2026年5月24日首发于HuggingFace平台,使用LeRobot框架创建,专门用于机器人控制和学习任务。
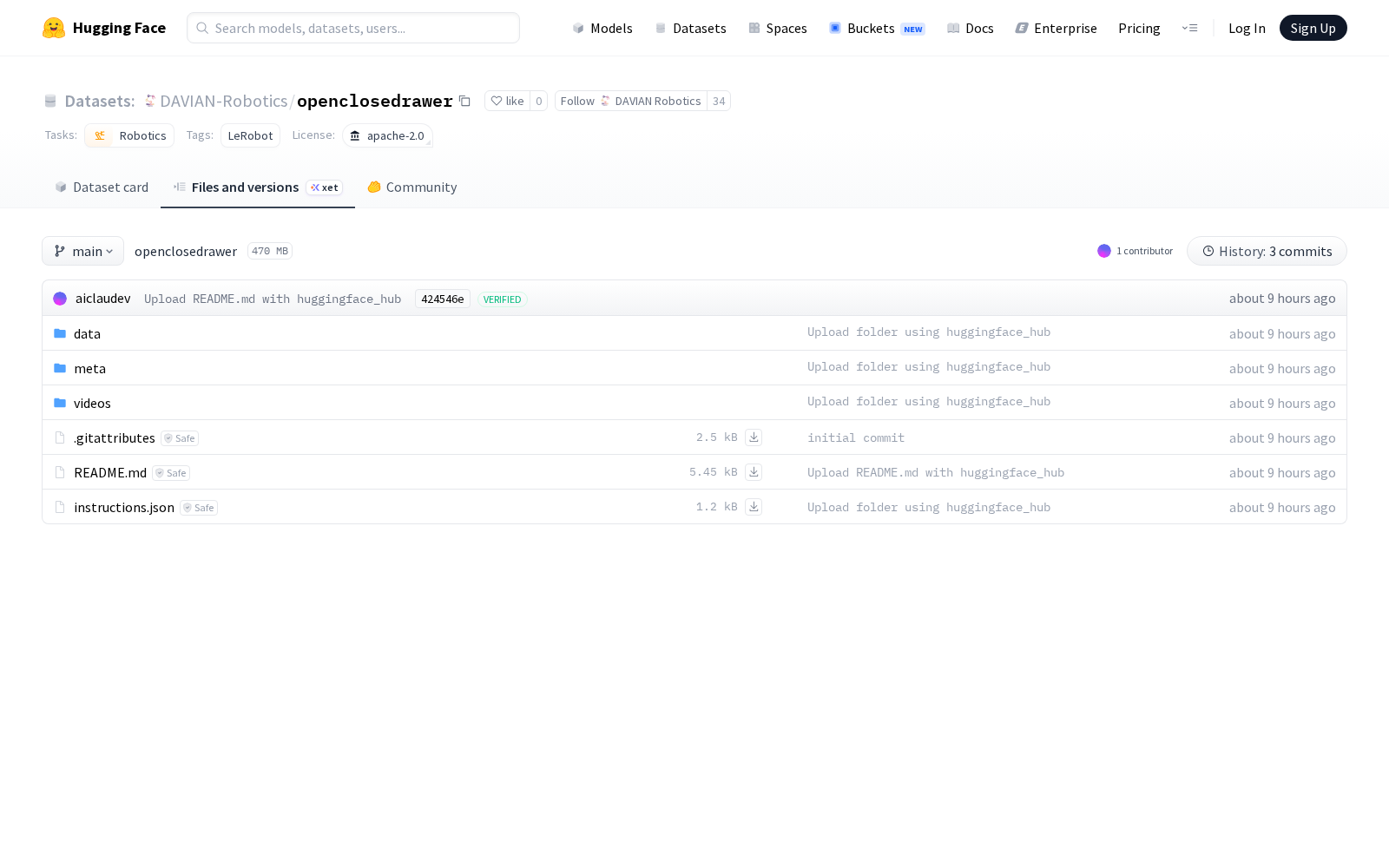
该数据集基于Franka机器人采集,包含40个episodes,总计9147帧,涵盖2个不同的开闭抽屉任务。所有数据采用parquet文件格式存储结构化数据、mp4格式存储视频内容,帧率为20fps,可满足时序类机器学习模型的训练精度要求。数据集特征丰富,包括状态观测(如关节位置、速度、末端执行器位姿和抓取状态)、动作控制(如位置、四元数和抓取器指令),以及来自多个摄像头的图像观测(手腕摄像头、左后摄像头和右后摄像头),图像分辨率为480x640,彩色三通道;多摄像头的观测设计兼顾了末端执行器的局部操作细节与作业环境的全局空间信息,可支撑不同视角下的视觉识别、位姿估计模型训练。此外,还包含时间戳、帧索引、episode索引、全局索引和任务索引等元数据,为研究人员拆分任务、对照时序训练效果、开展多任务迁移学习提供了标准化支撑。
该数据集不仅适用于机器人强化学习、模仿学习或视觉运动控制等基础研究领域,在产业落地层面也具备广阔应用空间:可直接服务于家庭服务机器人的储物空间操作、工业协作机器人的工位料柜存取、人形机器人的日常交互操作等场景的模型训练,还可作为基础数据集支撑开合类操作任务的迁移学习研究,覆盖开门、开盒等更多同类操作场景的算法迭代。作为垂直场景的高质量专用数据集,openclosedrawer的发布进一步丰富了机器人细分操作领域的公开数据集供给,可大幅降低机器人研发团队的自主数据采集成本,缩短模型迭代周期,对于推动机器人从定点重复作业向自主复杂交互升级、加快通用机器人的场景落地进程具有重要支撑作用。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)