

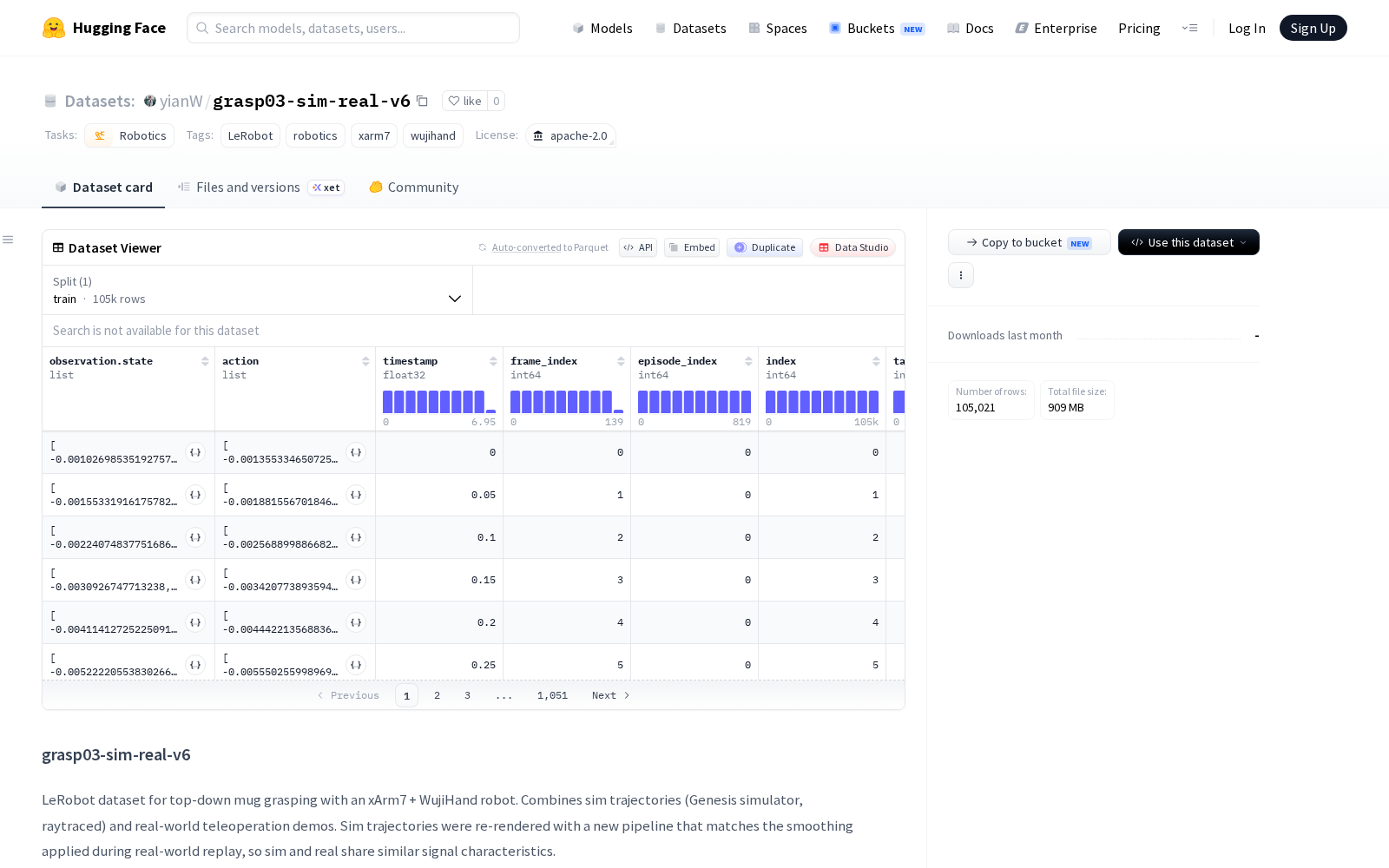
近年具身智能产业进入爆发期,机械臂抓取、柔性操作等核心能力的迭代高度依赖高质量标注数据集,但长期以来,模拟生成数据与真实世界采集数据存在的“域偏差”问题,始终是制约算法从实验室走向落地场景的核心瓶颈,行业对虚实对齐的专项训练数据集需求持续攀升。近日,科技机构yianW正式发布grasp03-sim-real-v6专项数据集,该产品作为LeRobot项目的核心组成部分,定向服务于机器人抓取、机械臂控制领域的算法研发与场景落地。
该数据集针对自上而下的杯子抓取场景构建,硬件适配xArm7机械臂与WujiHand手爪,首次实现了模拟轨迹与真实世界遥操作演示数据的特性对齐:其中模拟轨迹基于Genesis模拟器通过光线追踪渲染生成,并通过全新处理管道重新渲染匹配真实世界回放的平滑处理逻辑,彻底解决了传统模拟数据与真实数据信号特性不一致的痛点,大幅降低算法跨域适配的成本。
公开信息显示,该数据集共包含820个任务序列(episodes),覆盖“从顶部抓取杯子并抬起”的完整操作流程,采集帧率为20FPS,状态与动作维度均达到27维,其中涵盖7个机械臂自由度与20个手部自由度(手部数据按深度优先搜索顺序排列),可完整还原抓取操作全链路的动作逻辑;同时配备第三人称、手腕视角两路640×480分辨率的图像采集数据,可支撑多模态视觉算法的训练需求。此外,数据集还针对场景变量做了标准化设计,包含杯子、基座、机器人颜色等多维度场景随机化配置,同步公开了模拟管道处理步骤(平稳帧过滤、平滑处理、运动学传送)、相机序列号、杯子模型等配套信息,采用Apache 2.0开源许可,支持研发团队免费商用与二次开发。
从应用价值来看,该类虚实对齐的抓取专项数据集,可广泛应用于工业分拣、物流仓储、家庭服务等多个场景的机械臂算法训练,既可以帮助研发团队降低真实世界数据采集的高成本问题,也能有效提升算法在真实场景的泛化能力,为具身智能通用操作能力的迭代提供核心数据支撑。本次数据集的发布,也进一步丰富了机器人领域的开源数据要素供给,为推动具身智能产业的技术普惠、降低研发门槛提供了重要助力。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)