

近年来,随着工业自动化、通用服务机器人、人形机器人赛道的快速迭代,机器人复杂场景操作、精准物体抓取等核心能力的训练需求持续爆发。作为AI模型训练的核心生产资料,高质量、标准化的垂直场景数据集长期是机器人领域的稀缺资源:传统自研数据采集模式不仅单场景采集成本高企,标注周期长、场景覆盖有限的痛点,更往往导致训练出的模型泛化能力不足,难以适配复杂真实场景,适配主流开发框架的开源机器人操作数据集已经成为行业刚需的公共技术资源。
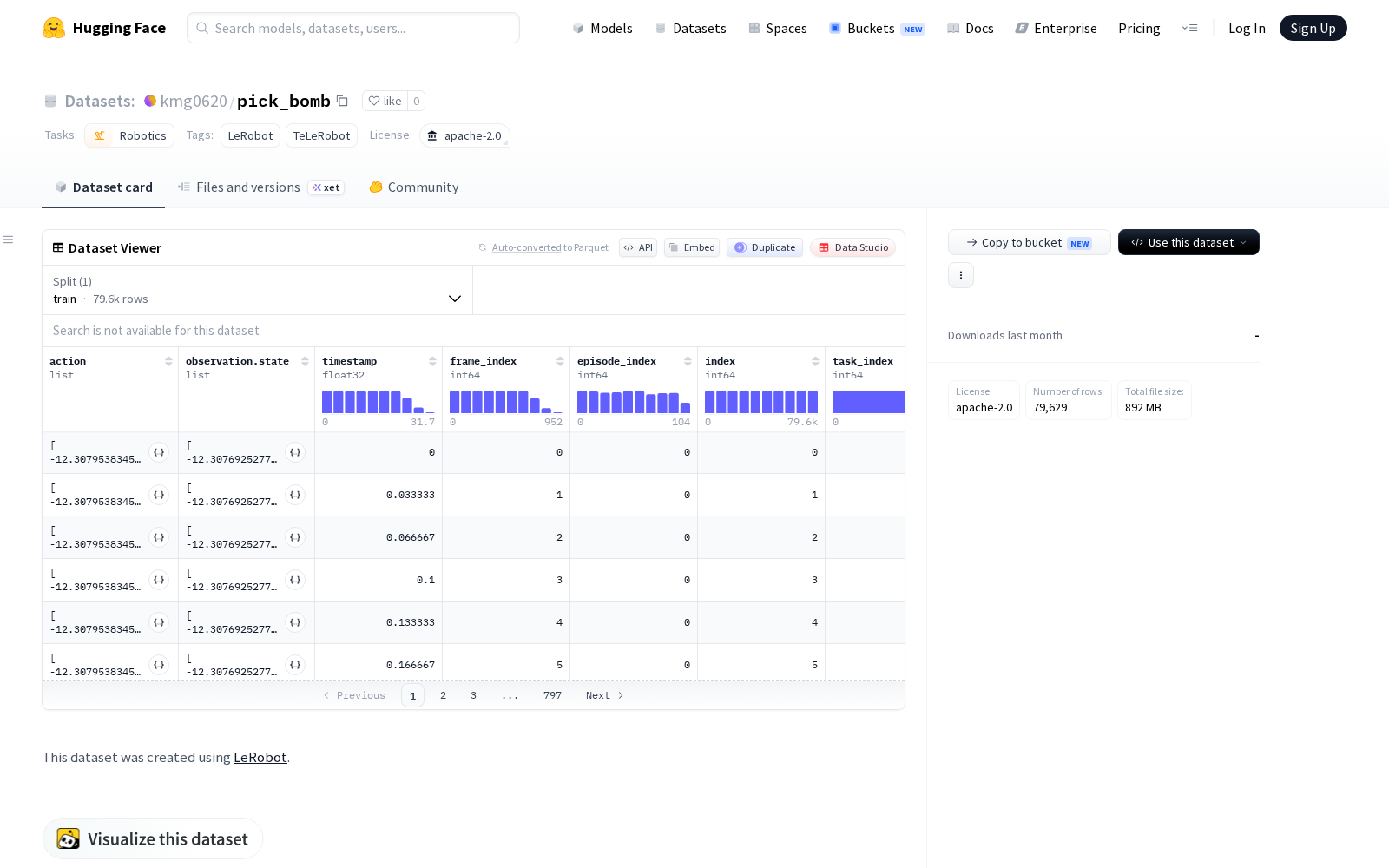
在此背景下,开源贡献者kmg0620本次发布的pick_bomb数据集,为HuggingFace LeRobot格式机器人数据集,于2026年5月24日首发于全球最大的AI开源社区HuggingFace,开发者可直接通过社区入口获取使用。查看pick_bomb
据了解,LeRobot是HuggingFace面向机器人学习领域推出的标准化数据集格式,可直接兼容PyTorch、TensorFlow等主流AI开发框架,以及全球多数商用机器人的训练工具链,无需额外做数据格式转换即可快速接入训练流程,可帮助开发者降低至少30%的数据集适配成本。聚焦机器人抓取、操作场景的pick_bomb数据集,可广泛应用于工业分拣机器人的多品类物件抓取算法训练、家用服务机器人的日常物品操作模型迭代、人形机器人的精细动作能力开发等多个典型场景,相比通用类机器人数据集,垂直场景的针对性标注设置能够有效提升算法训练效率,降低模型落地时的误操作概率。
行业分析指出,垂直场景开源数据集的开放,是推动机器人领域技术普惠的重要基础:中小研发团队无需投入高额成本采集标注数据,即可基于成熟数据集开展算法研发,能够大幅降低机器人操作领域的创新门槛,加速相关技术的商业化落地进程,也为数据要素在人工智能垂直领域的开放共享提供了典型样本。
Dataset card内容:
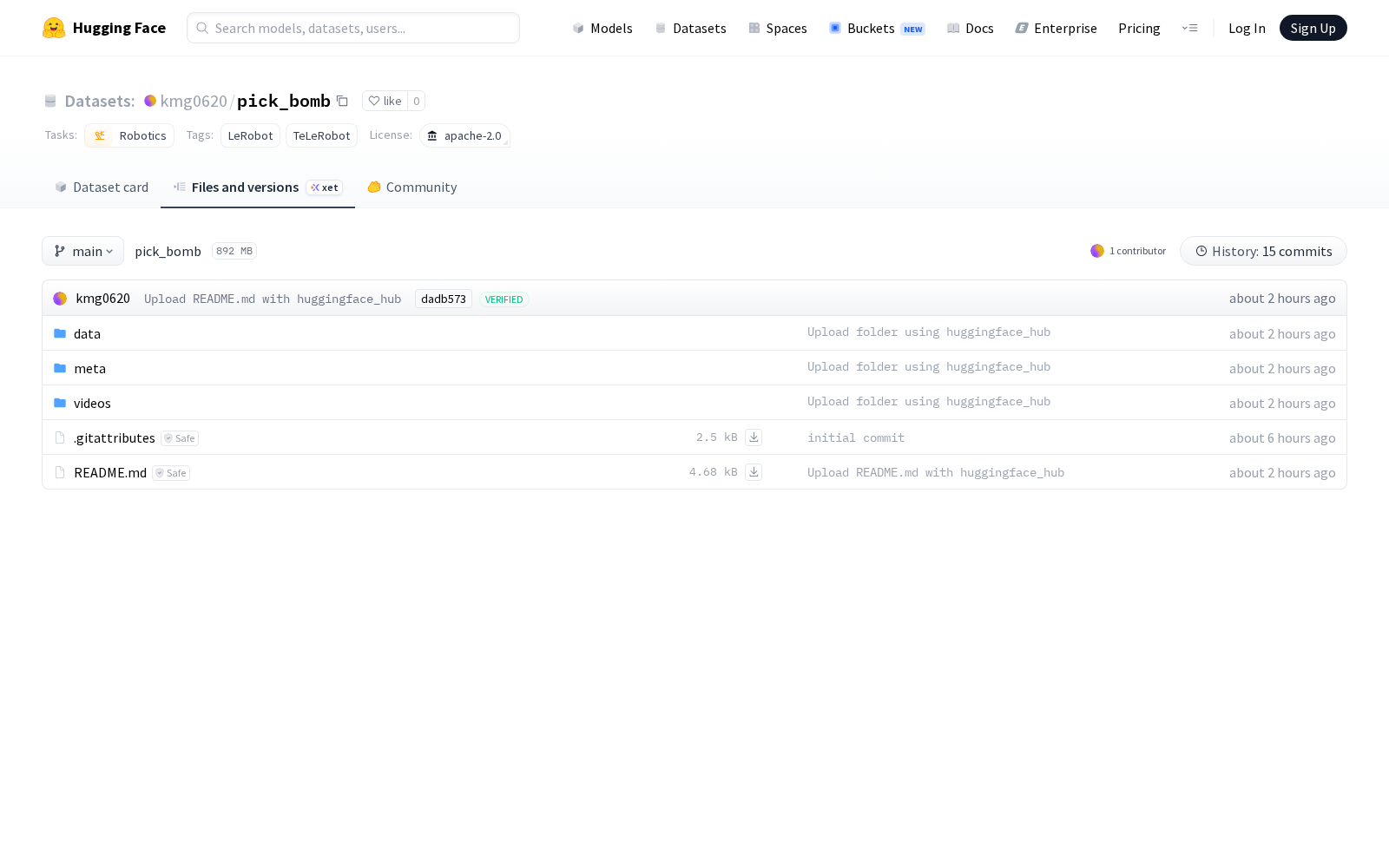
Files and versions内容:



_1769672084863.jpg)