

近年来,随着具身智能、工业自主机器人赛道的快速爆发,算法训练对真实场景下的多维度标注数据集需求持续攀升。由于实体机器人测试成本高、场景复现难度大,当前行业公开的机器人操作数据集大多以仿真数据为主,与真实落地场景存在明显的“现实落差”,也难以覆盖感知、决策、动作执行的全链路数据匹配需求。此次cupnb发布的ur10e_real_cube_all_no_joints_crop数据集,正是瞄准这一行业痛点推出的实体机器人专用操作数据集,该数据集基于LeRobot工具创建,聚焦UR10e真实机器人操作立方体的典型任务场景,可为机器人学习、控制算法研发提供高匹配度的真实训练素材。
本次公开的数据集共包含349个任务序列(episodes),总计325,838帧有效数据,采样帧率为30 fps,覆盖机器人操作全流程的多维度数据特征:不仅包含动作数据(如机械臂线性/角速度、夹爪位置)、三个不同视角摄像头采集的视频观测数据(分辨率分别为720x720和720x1280)、机器人实时运行状态(如位置、四元数姿态),还配套了时间戳、帧索引、序列索引、任务索引等完整元数据,可实现不同维度数据的精准时间对齐。数据集采用parquet结构化数据+mp4视频的格式存储,其中结构化数据文件总大小为100 MB,视频文件总大小为200 MB,便于研发人员快速调用、处理。
从应用价值来看,该数据集可广泛用于训练和评估各类机器人控制算法,适配多种机器人学习任务:典型应用场景包括工业场景下机器人抓取、分拣、小部件装配的控制算法预训练与效果验证,具身智能体多模态感知-决策链路的精度优化,以及模仿学习、强化学习等前沿机器人学习范式的效果测试。研发团队可基于该数据集降低实体机器人实机测试的硬件成本,缩短算法迭代周期,也可基于该标准化数据集开展不同算法的横向效果对比。作为机器人领域的细分高质量数据资源,本次数据集的发布也进一步丰富了机器人赛道的公开数据要素供给,对推动行业开源协作、降低中小研发团队的技术准入门槛具有积极意义。
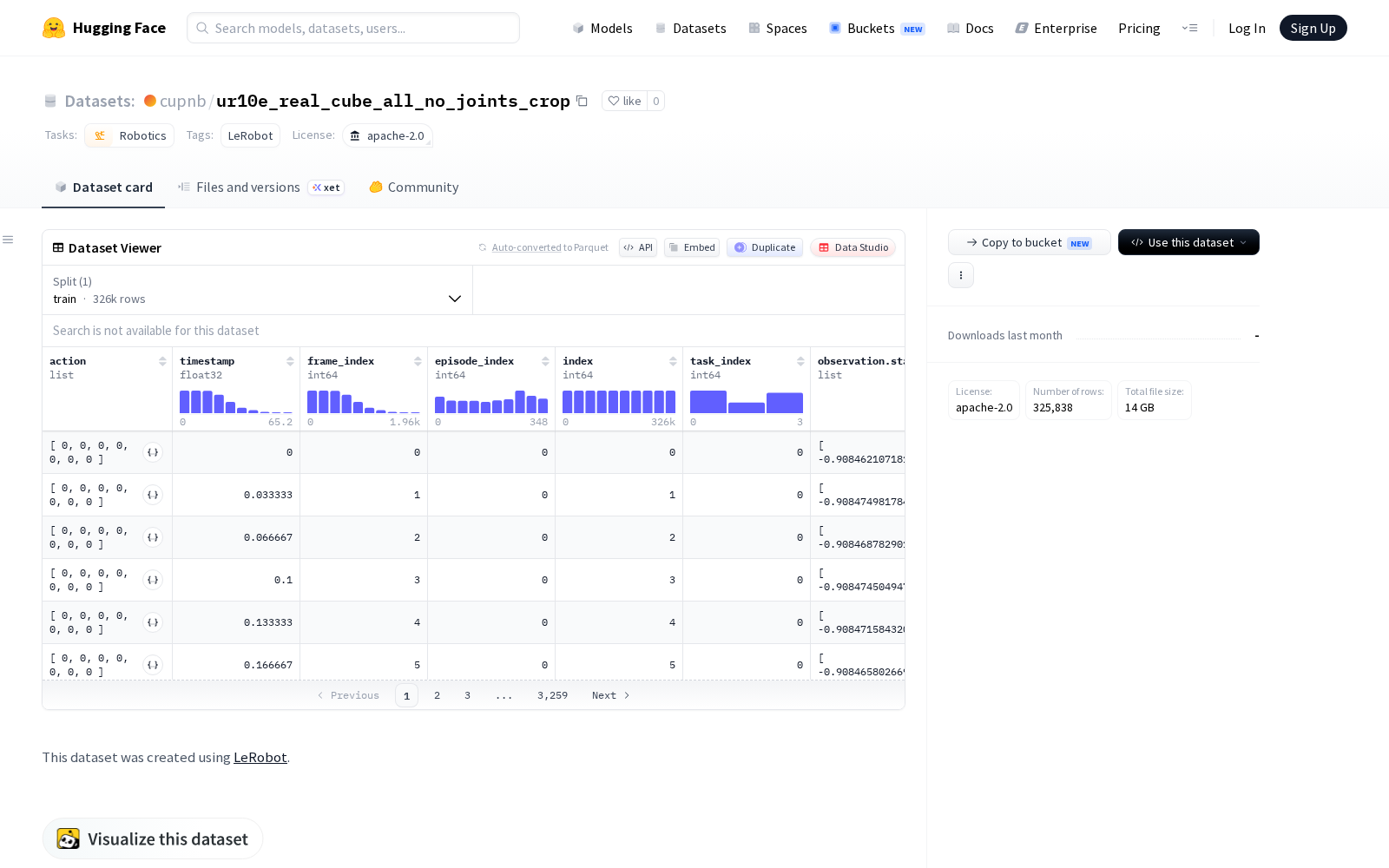
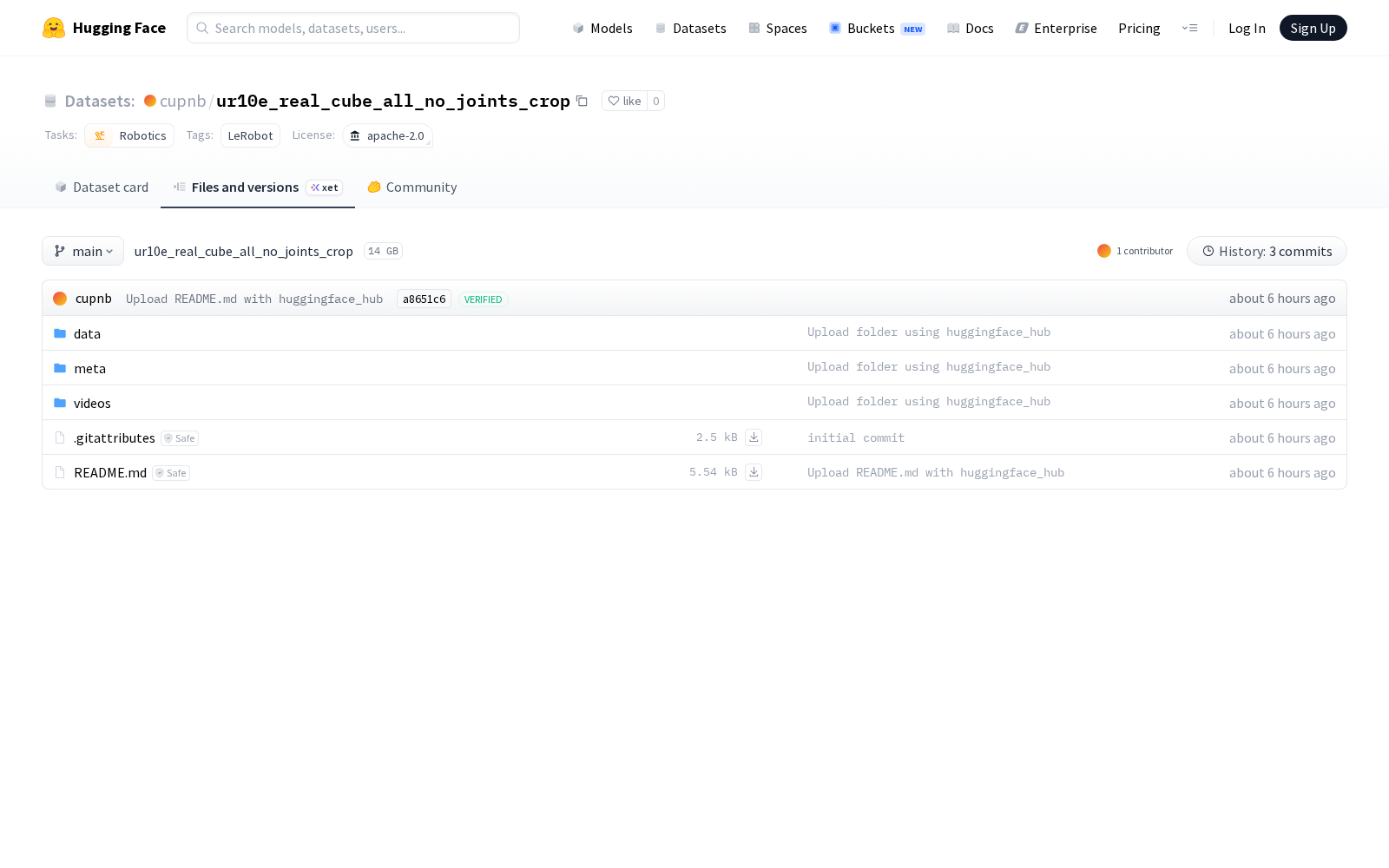
查看ur10e_real_cube_all_no_joints_crop
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)