

作为当前人工智能领域最具增长潜力的核心赛道之一,具身智能与实体机器人的落地进度高度依赖高质量、标准化的训练与测试数据供给。过去很长一段时间里,全球机器人领域的公开数据集普遍存在格式不统一、标注标准不一致的问题,不同研发团队的测试结果难以横向对标,数据预处理环节也占据了大量研发成本。针对这一行业痛点,专门面向机器人学习场景的LeRobot格式近年来逐渐成为行业通用的标准化数据存储规范,统一了多模态感知数据(视觉、力觉、关节状态等)、动作序列、任务标签等字段的存储逻辑,可直接适配主流的机器人训练框架,大幅降低研发团队的数据适配成本。
在此背景下,dillonlyr04本次发布的数据集eval_final_k50_v3,正是采用Hugging Face LeRobot格式的专用机器人数据集,于2026年5月24日率先在Hugging Face平台上线,核心应用方向覆盖机器人任务评估、模仿学习两大核心研发场景。
从具体应用价值来看,在机器人任务评估场景中,该标准化数据集可作为通用基准测试集,支持移动机器人导航、机械臂抓取、人机自然交互等多类典型机器人任务的性能校验,帮助研发团队快速定位算法短板,同时解决了过往不同机构自定义测试集导致的评估结果可比性不足的问题;在模仿学习场景中,该数据集可为具身智能模型提供标准化的专家演示数据,支撑行为克隆、逆强化学习等算法的训练,有效缩短机器人从仿真环境迁移到真实场景的适配周期。
本次数据集的发布,进一步丰富了全球机器人领域的标准化公开数据供给,对降低中小研发团队的技术门槛、推动具身智能技术的普惠创新具有积极意义。用户可通过下方链接查看数据集的详细信息:
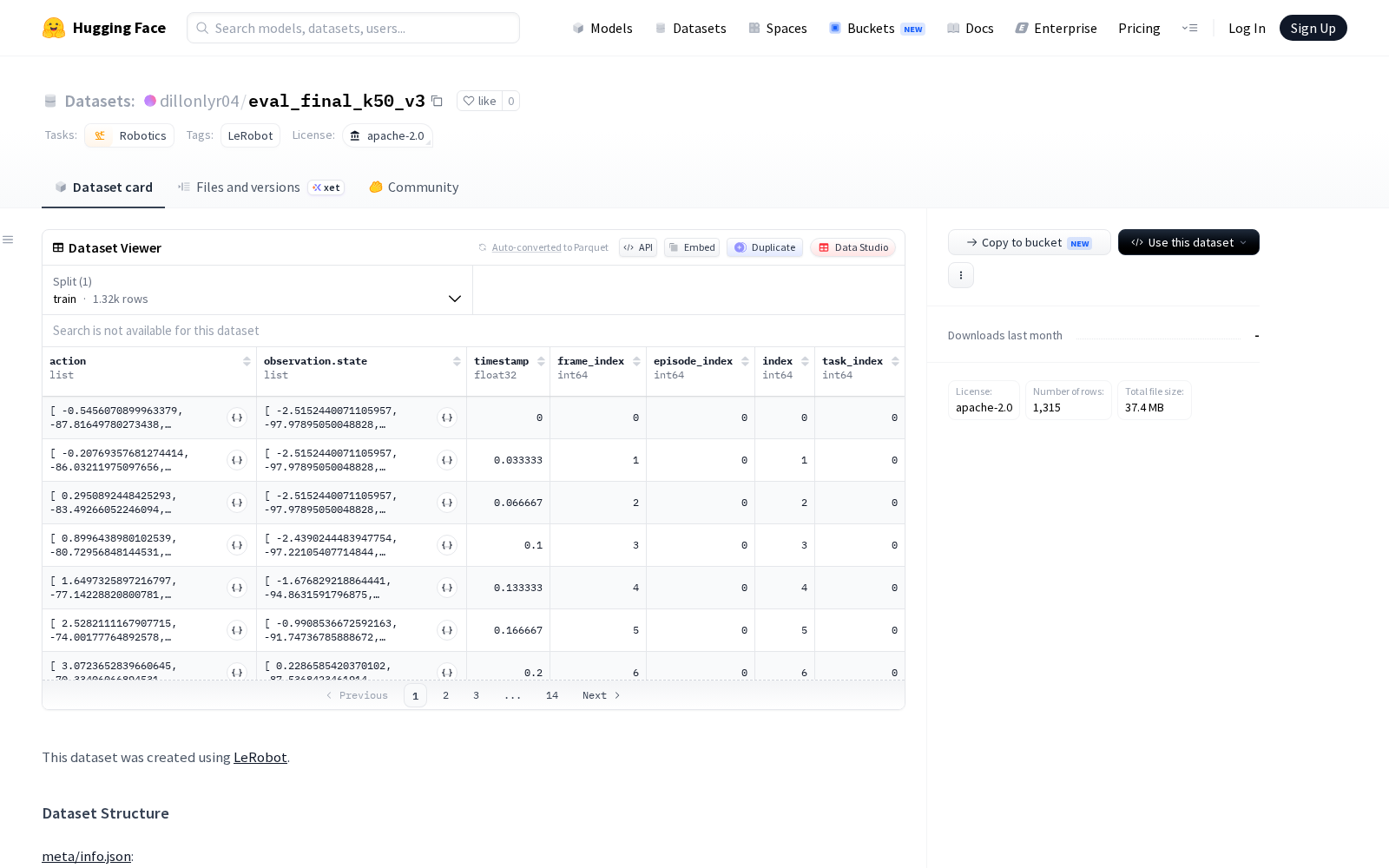
Dataset card内容:
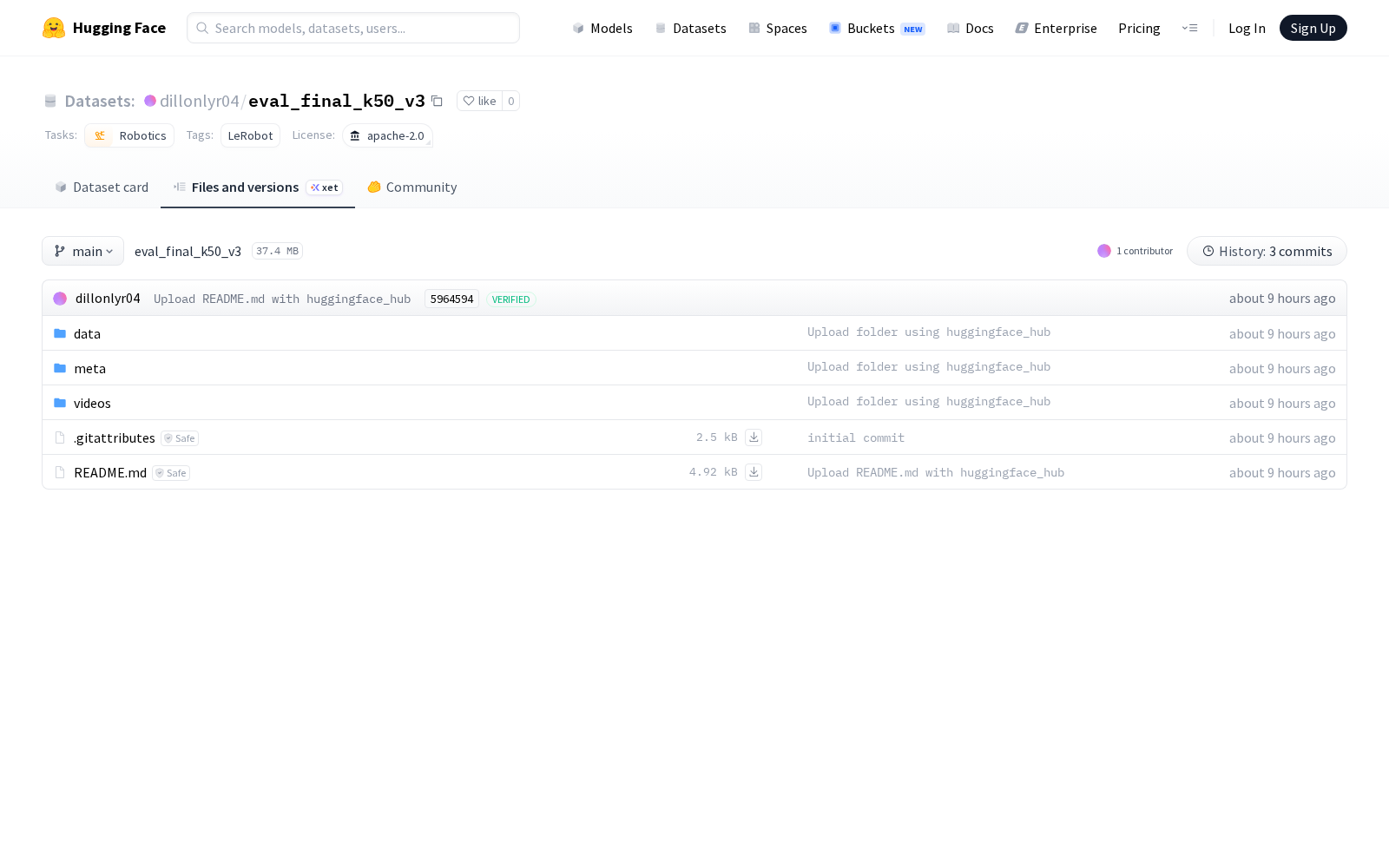
Files and versions内容:



_1769672084863.jpg)