

随着具身智能产业进入快速落地期,高质量、标准化的机器人动作数据集已经成为支撑机器人学习算法迭代、降低通用机器人研发门槛的核心基础资源。此前HuggingFace推出的LeRobot格式作为全球通用的机器人数据集标准框架,统一了多来源机器人感知、操作数据的存储与调用规范,大幅降低了全球开发者的数据适配成本,也成为当前机器人领域数据集发布的主流标准。
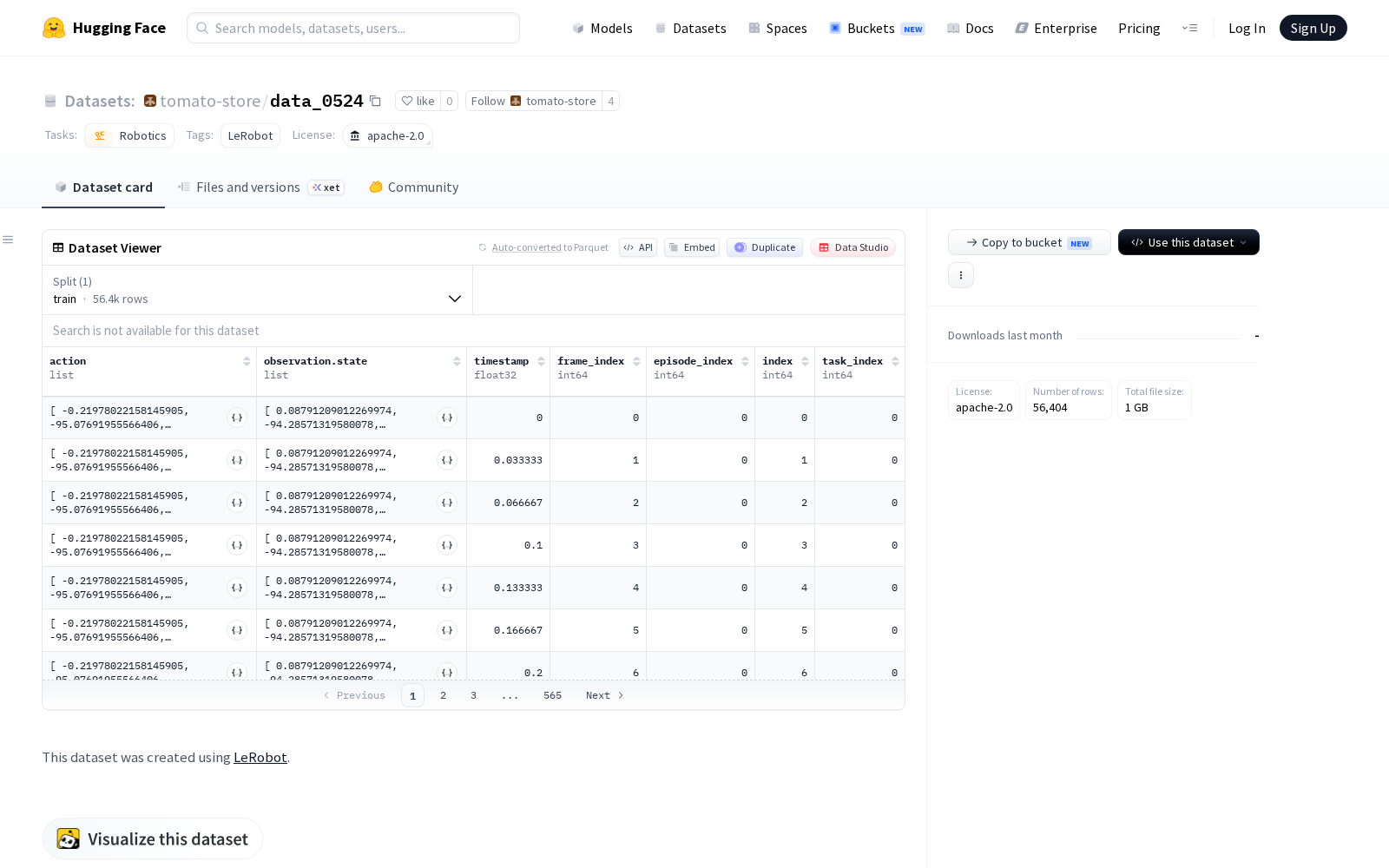
tomato-store本次发布的数据集data_0524,该数据集为HuggingFace LeRobot格式机器人数据集,已率先在HuggingFace平台上线,面向全球机器人研发团队、AI开发者开放调用。查看data_0524
据行业通用应用逻辑测算,该数据集可广泛应用于机器人学习、机器人操作相关的技术研发场景,典型应用方向包括工业机械臂柔性抓取算法训练、服务机器人自主作业逻辑优化、人形机器人动作轨迹规划、多模态人机交互模型迭代等,能够为不同场景的机器人技能训练提供标准化的基础数据支撑,有效降低研发团队的原始数据采集与标注成本,压缩算法迭代周期。
本次标准化机器人数据集的发布,也是数据要素在垂直科技领域落地的典型实践:统一格式的专用数据集一方面能够加速机器人领域的算法复用与技术迭代,降低中小团队进入具身智能赛道的门槛;另一方面也为垂直领域数据资源的规范化流通、价值释放提供了可参考的路径,对推动具身智能产业的普惠化发展、完善全球机器人数据要素流通生态具有积极意义。
Dataset card内容:
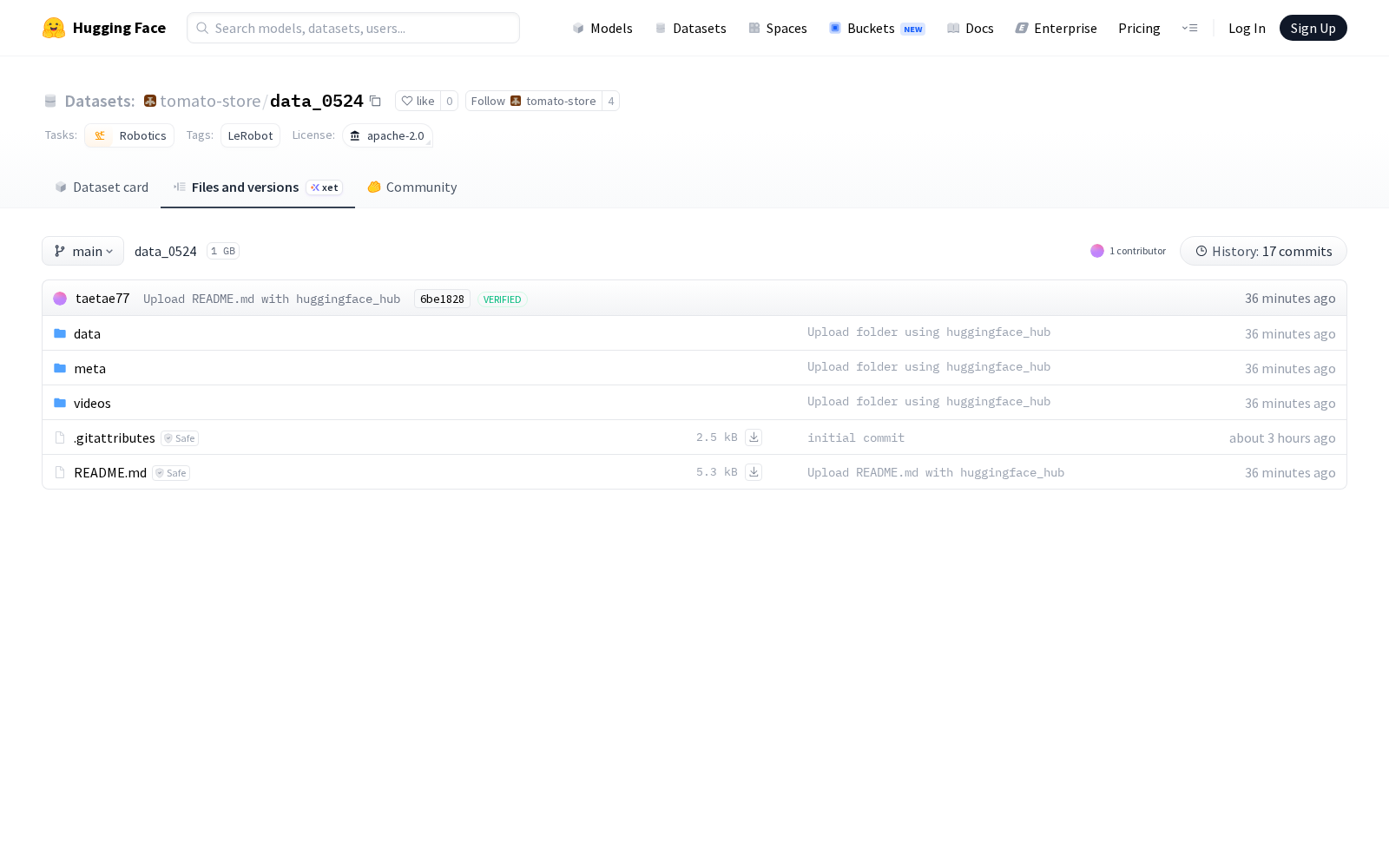
Files and versions内容:



_1769672084863.jpg)