

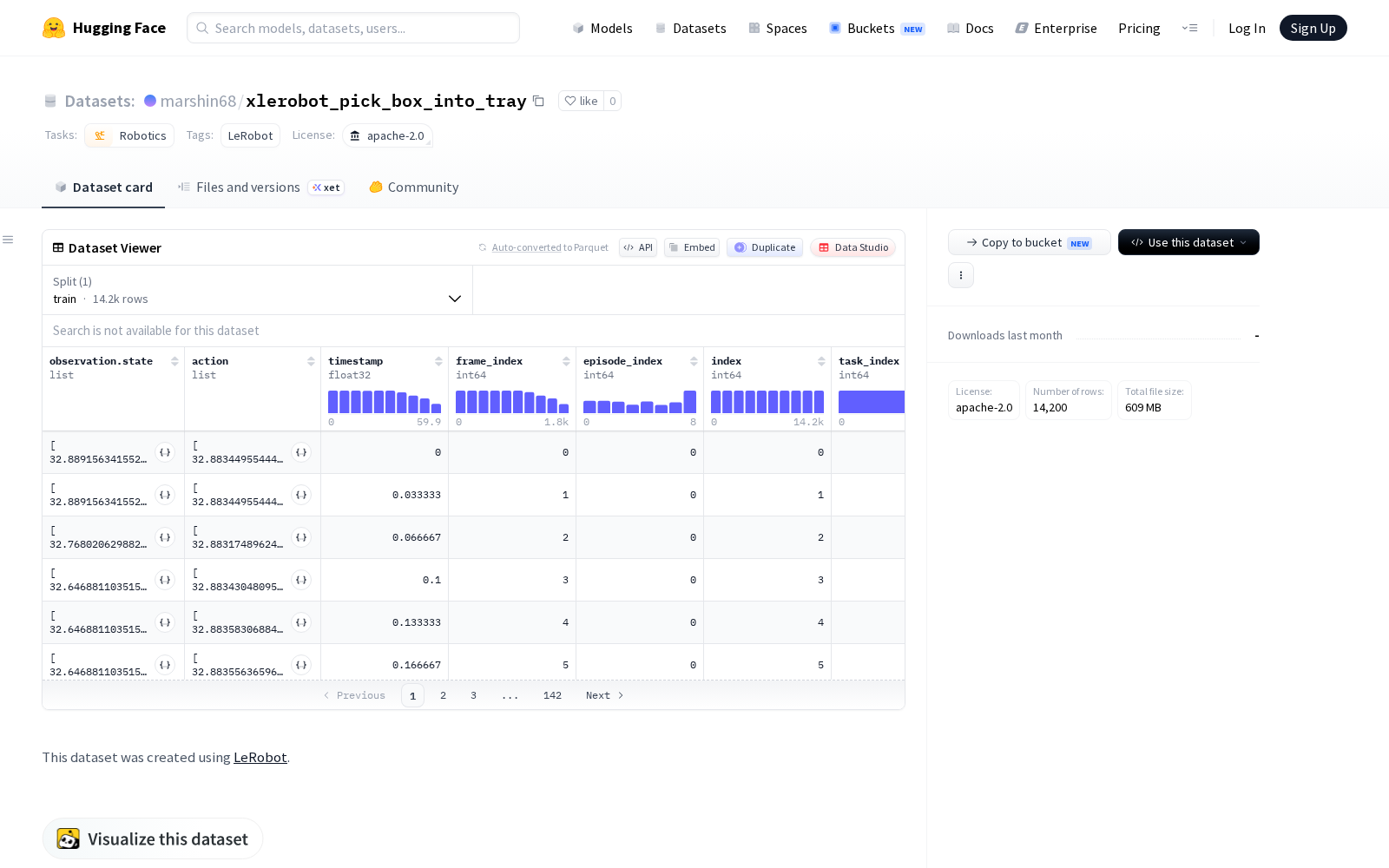
marshin68本次发布的数据集xlerobot_pick_box_into_tray,该数据集是一个用于机器人学任务的数据集,由LeRobot创建。它包含双轮机器人(xlerobot_2wheels_client)的观察和动作数据,用于训练和评估机器人控制模型。数据集包括9个回合、14200帧,涵盖一个任务。观察数据包括16维的机器人状态(如左右机械臂的关节位置、头部电机位置、速度和角速度)以及三个视角的视频数据(头部、左手腕、右手腕),视频分辨率为480x640,帧率为30fps。动作数据同样为16维,与观察状态对应。数据集以Parquet格式存储,并附带视频文件,总数据文件大小为100MB,视频文件大小为200MB。数据分割为训练集(所有回合)。
Dataset card内容:
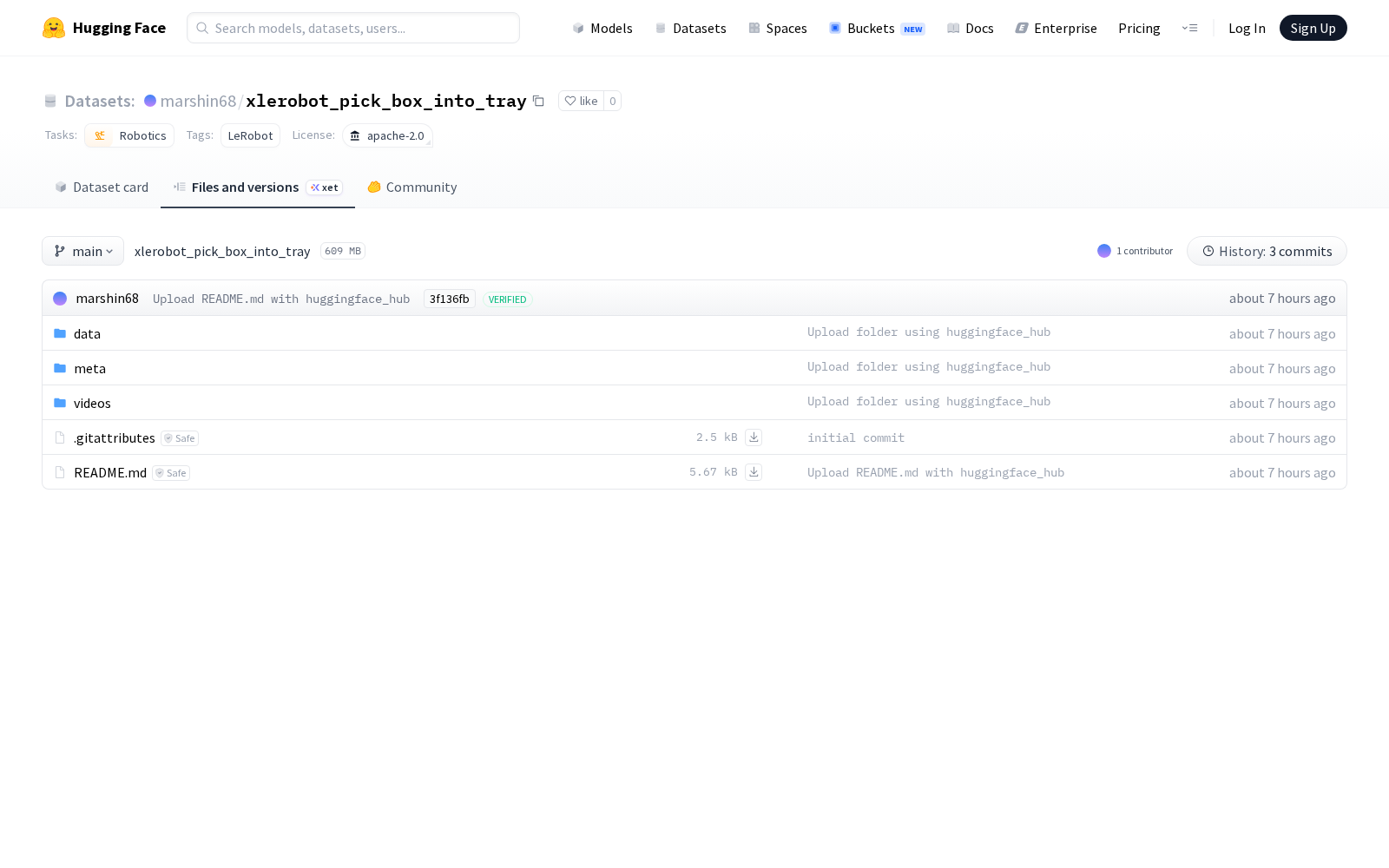
Files and versions内容:



_1769672084863.jpg)