

当前,服务机器人、仓储分拣机器人的商用落地正进入攻坚阶段,非结构化场景下异形、软质、易碎物品的抓取、打包操作,是制约相关产品能力提升的核心瓶颈,而高质量的场景化训练数据,是攻克这一难题的核心基础。近日,机器人领域技术研发方Nodogoro正式发布cell1_20260523_mohammed_groceries_packing_20260523_223550数据集,该数据集是基于LeRobot开源机器人学习框架创建的专用机器人学习数据集,瞄准机器人杂货打包类操作任务的训练需求打造,于2026年5月24日首发于全球知名AI开源社区HuggingFace。
据公开信息显示,本次发布的数据集共包含5个完整操作剧集与3209帧采样数据,所有数据采集均基于starpilot_yam_gripper双机械臂机器人完成,覆盖从感知到执行的全链路研发所需数据维度:其一为动作数据,包含两个机械臂的14维位置、旋转角度和夹爪宽度参数,可精准还原机械臂完成打包操作的全流程运动逻辑;其二为观察状态数据,覆盖32维编码器角度、IMU加速度和陀螺仪数据、姿态四元数以及夹爪距离等传感信息,可支撑机器人运动控制算法的训练优化;其三为多视角视觉数据,包含左腕、右腕摄像头的480x640分辨率RGB图像与深度图像,以及基座摄像头的480x640、768x1024两种分辨率RGB图像,所有视频素材均以30fps帧率录制,数据以Parquet格式存储、视频以MP4格式存储,可满足多模态视觉感知模型的训练需求。
从应用方向来看,该数据集可广泛适配机器人控制、视觉感知和强化学习等多类研究与研发需求,典型应用场景包括:面向家用服务机器人的物品整理、杂货打包功能研发,解决家居场景下零食、生鲜、日用品等多品类异形、易碎物品的安全抓取、精准放置难题;面向电商、商超仓储场景的分拣打包机器人迭代,优化多品类杂货混装订单的操作效率与差错率;此外还可用于机器人操作领域的基础算法研究,降低相关研发团队的实景数据采集成本,缩短模型训练周期。
作为机器人操作细分场景的专用数据集,本次发布的杂货打包数据集进一步丰富了全球开源机器人学习数据集的品类,为服务机器人、工业操作机器人的商用落地提供了重要的基础数据支撑,也符合当前数据要素赋能人工智能产业发展的行业趋势。
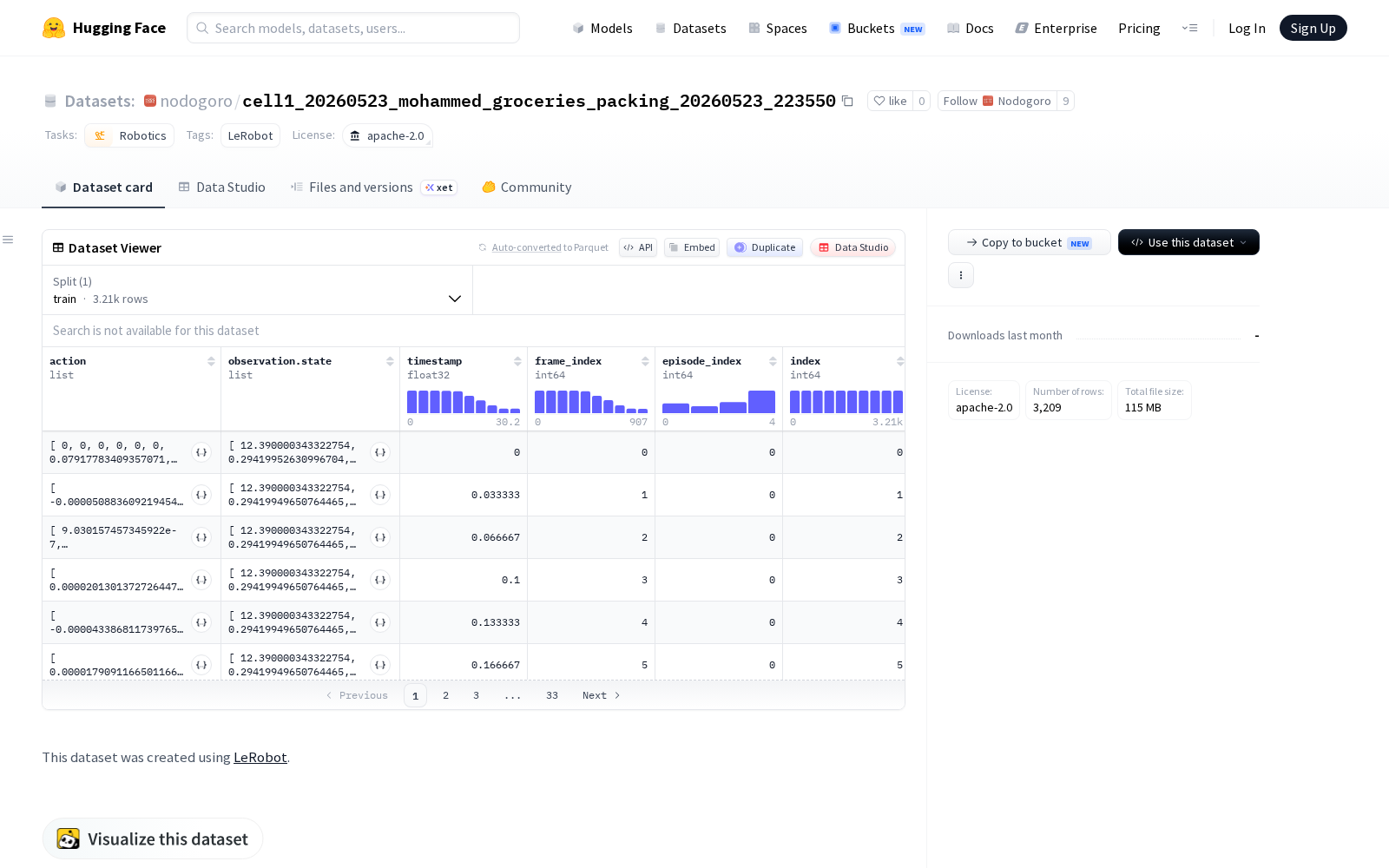
查看cell1_20260523_mohammed_groceries_packing_20260523_223550
Dataset card内容:
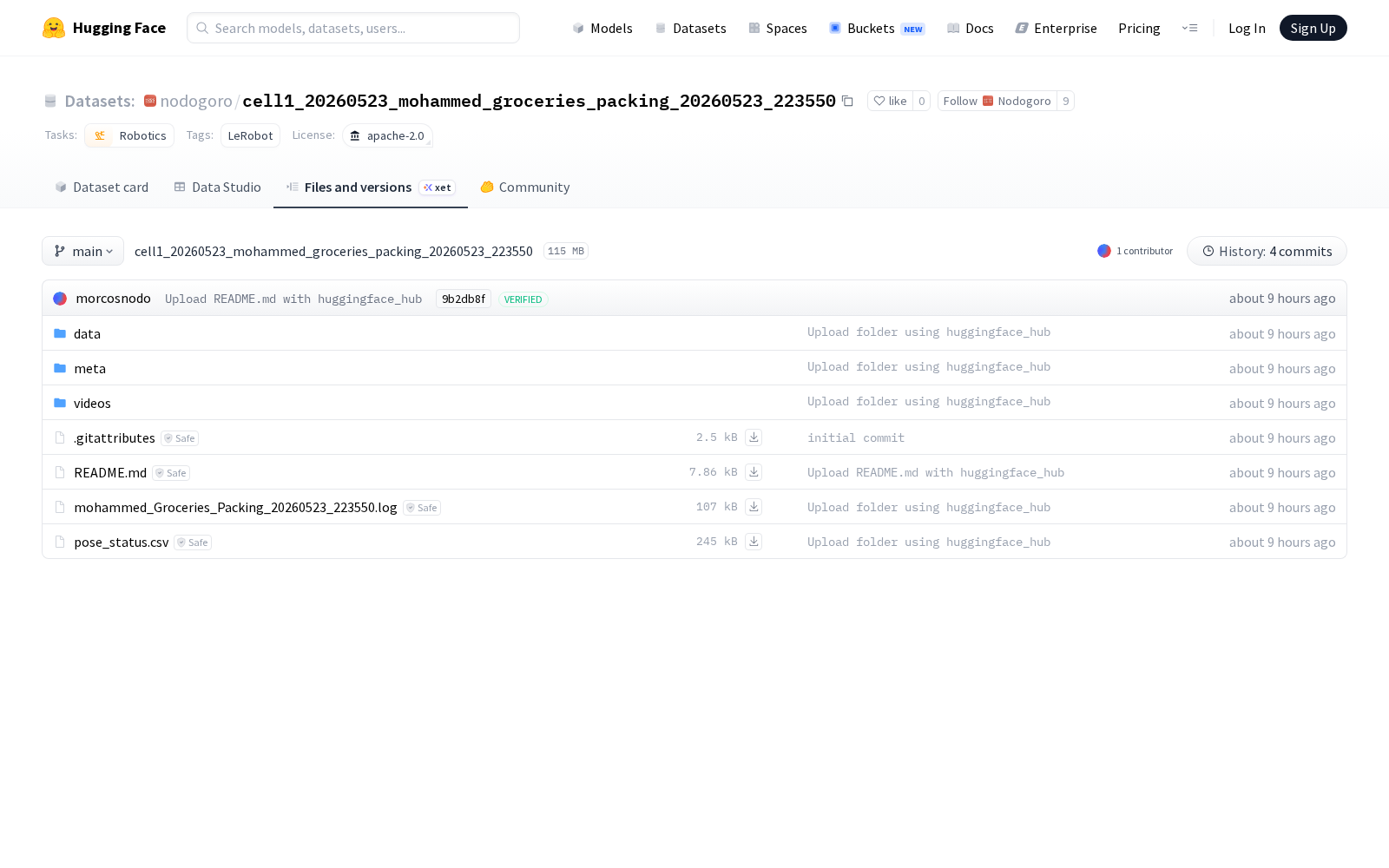
Files and versions内容:



_1769672084863.jpg)