

随着具身智能产业进入快速落地期,面向真实应用场景的结构化训练数据已经成为制约服务机器人研发效率的核心瓶颈,尤其是杂货打包这类涉及多品类物品识别、力度控制、空间堆叠规划的精细化操作场景,符合统一标准的高质量数据集供给长期不足。
nodogoro本次发布的数据集cell1_20260523_mohammed_groceries_packing_20260523_224628,该数据集为HuggingFace LeRobot格式机器人数据集。
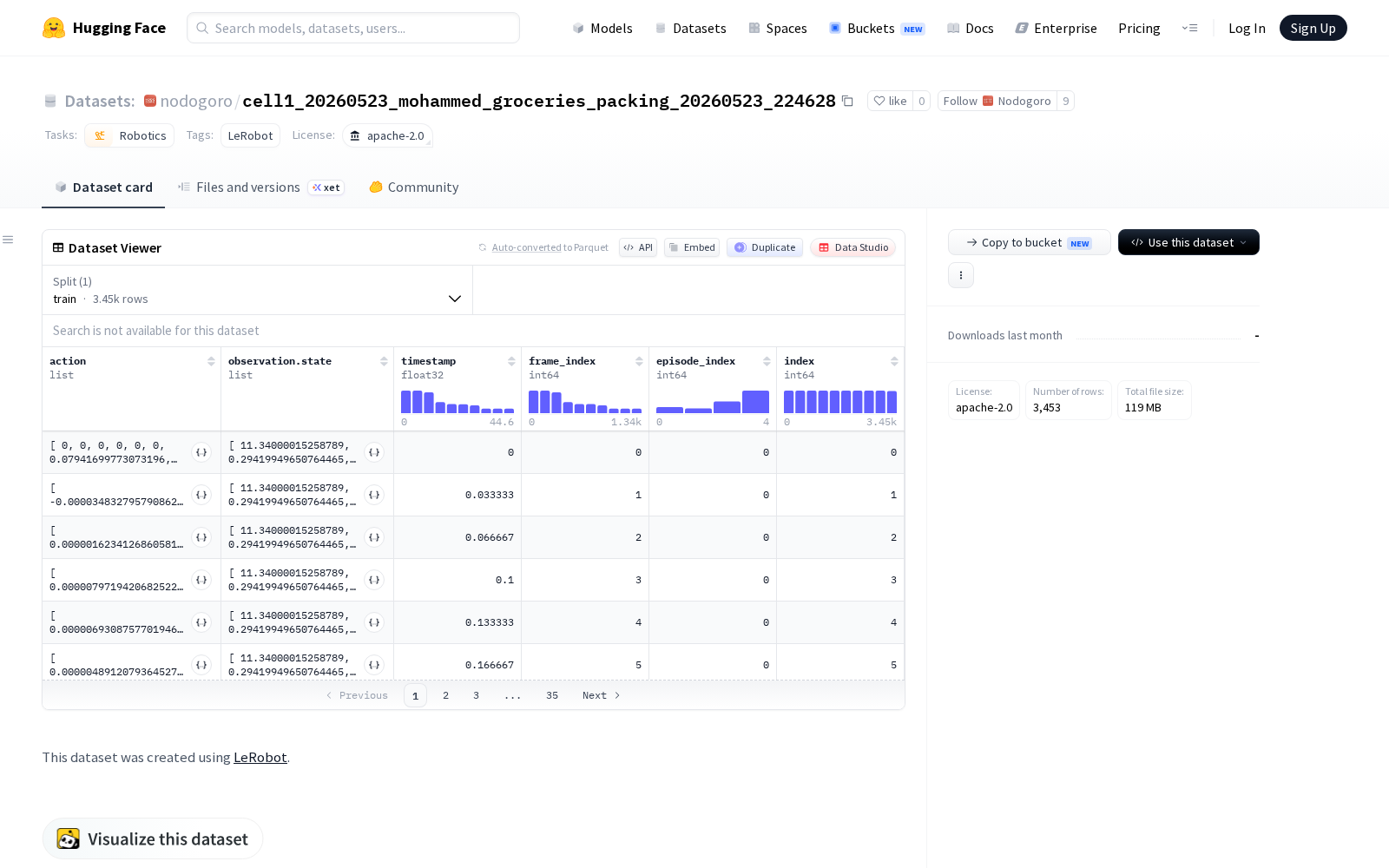
查看cell1_20260523_mohammed_groceries_packing_20260523_224628
Dataset card内容:
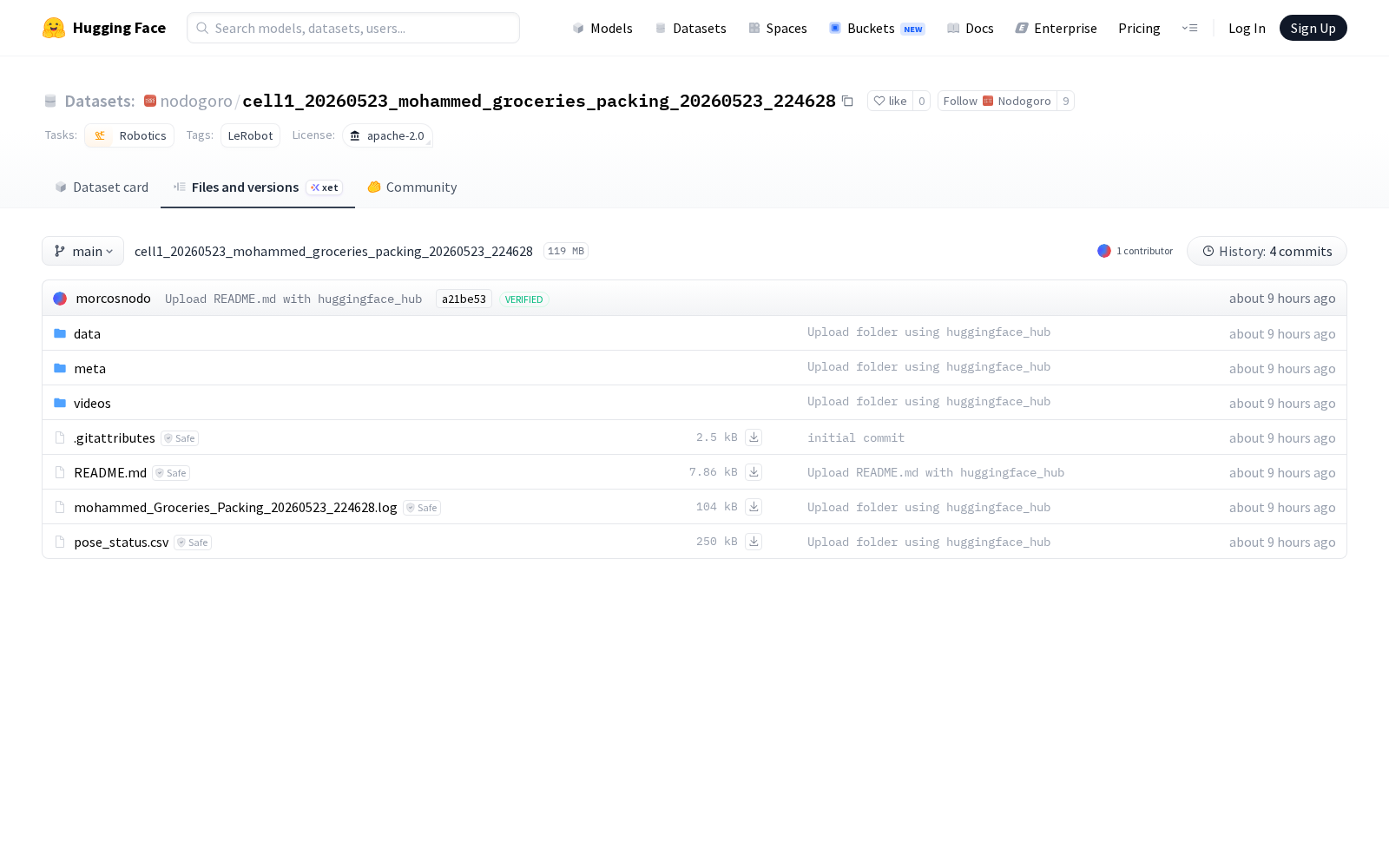
Files and versions内容:
据了解,该数据集于2026年5月24日率先在HuggingFace平台首发,采用LeRobot标准格式打造,可直接兼容当前主流的具身智能训练框架,研发团队无需额外做数据格式适配即可调用,大幅降低了相关领域的研发门槛。
从应用场景来看,该数据集覆盖了日常杂货打包全流程的操作数据,包含不同材质、形状、重量的杂货识别,抓取角度调整、堆叠空间规划、易碎品防护操作等多维度标注内容,未来可广泛应用于多类机器人研发场景:家用服务机器人的家居物品整理功能训练、线下商超的智能结算自动打包系统研发、电商快递网点的末端快件打包自动化升级,甚至可延伸至工业制造场景中小件散货的自动装箱工序训练,为跨场景通用操作类机器人的算法迭代提供核心数据支撑。
当前,全球AI训练数据要素市场规模持续增长,其中具身智能相关的场景化训练数据增速远超通用数据集平均水平。本次nodogoro发布的标准化场景数据集,一方面为具身智能细分赛道的研发团队提供了高质量的数据供给,另一方面也为生活服务类机器人训练数据集的标准化建设提供了参考样本,对推动具身智能技术从实验室验证走向民用消费场景落地具有重要的行业价值。



_1769672084863.jpg)