

当前,实体机器人已成为全球AI研发的核心赛道,而视觉运动控制(VMC)、末端智能抓取作为工业机器人、人形机器人落地的核心能力,其算法训练高度依赖高质量的实体交互数据集。但长期以来,机器人领域训练数据存在采集成本高、标注规范不统一、格式适配成本高的痛点,HuggingFace推出的LeRobot格式作为全球通用的机器人学习数据集标准,通过统一数据结构、标注规则大幅降低了开发者的数据预处理工作量,已成为机器人AI研发的主流数据格式。
近日,AI训练数据服务商lmsforAI正式发布so101_cube5cm_edge_pick_place_top_wrist_v1_20260524_194740数据集,该数据集严格遵循HuggingFace LeRobot格式规范,聚焦5cm立方体的边缘抓取、顶部放置等典型机械臂腕部操作场景,为机器人领域研发团队提供标准化的训练数据支撑。
查看so101_cube5cm_edge_pick_place_top_wrist_v1_20260524_194740
Dataset card内容:
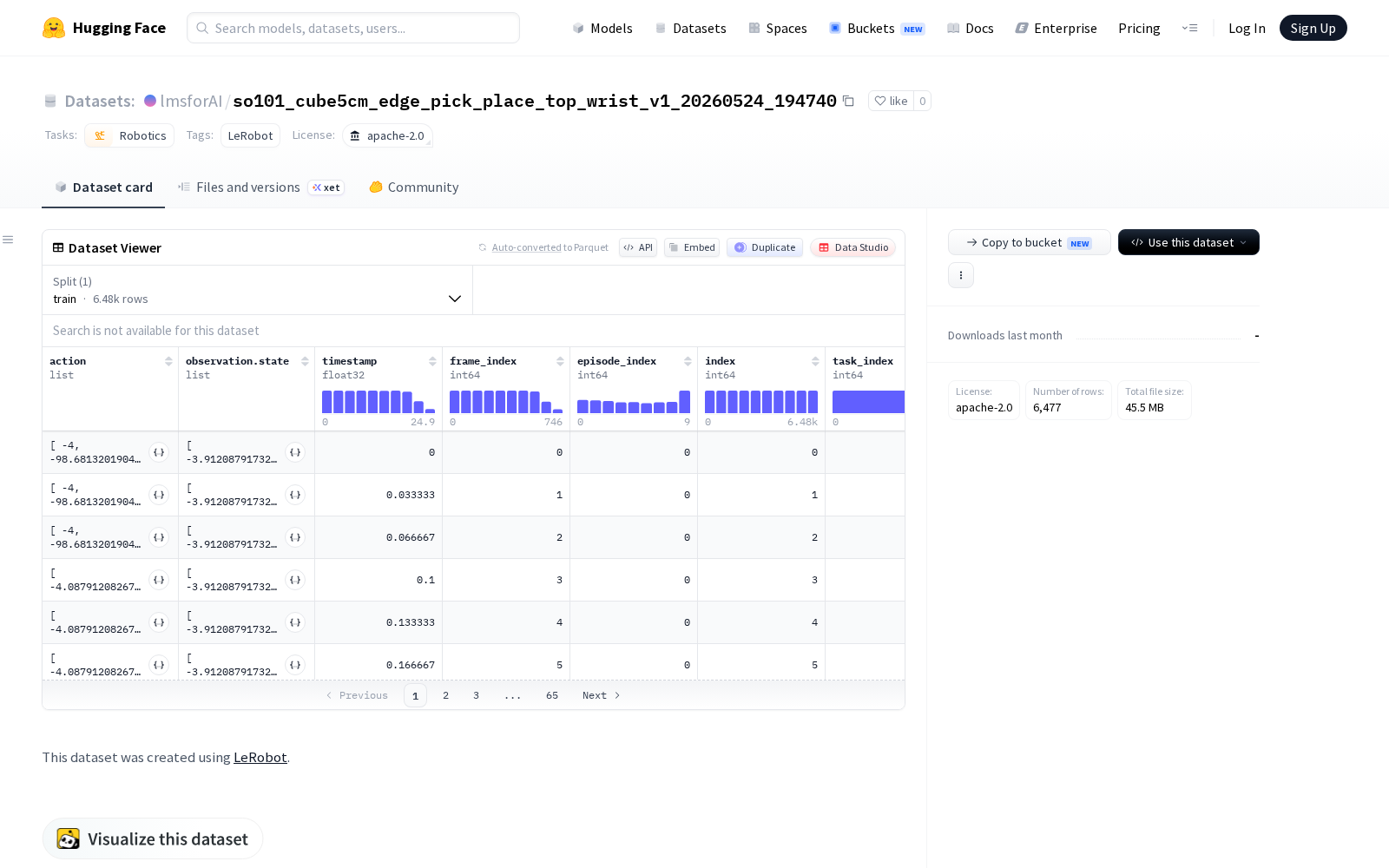
本次公开的Dataset card清晰标注了数据集的采集环境参数、传感器配置方案、动作样本量、标注维度等核心信息,研发人员可快速判断数据集与自身研发需求的匹配度,无需额外梳理数据基础属性。
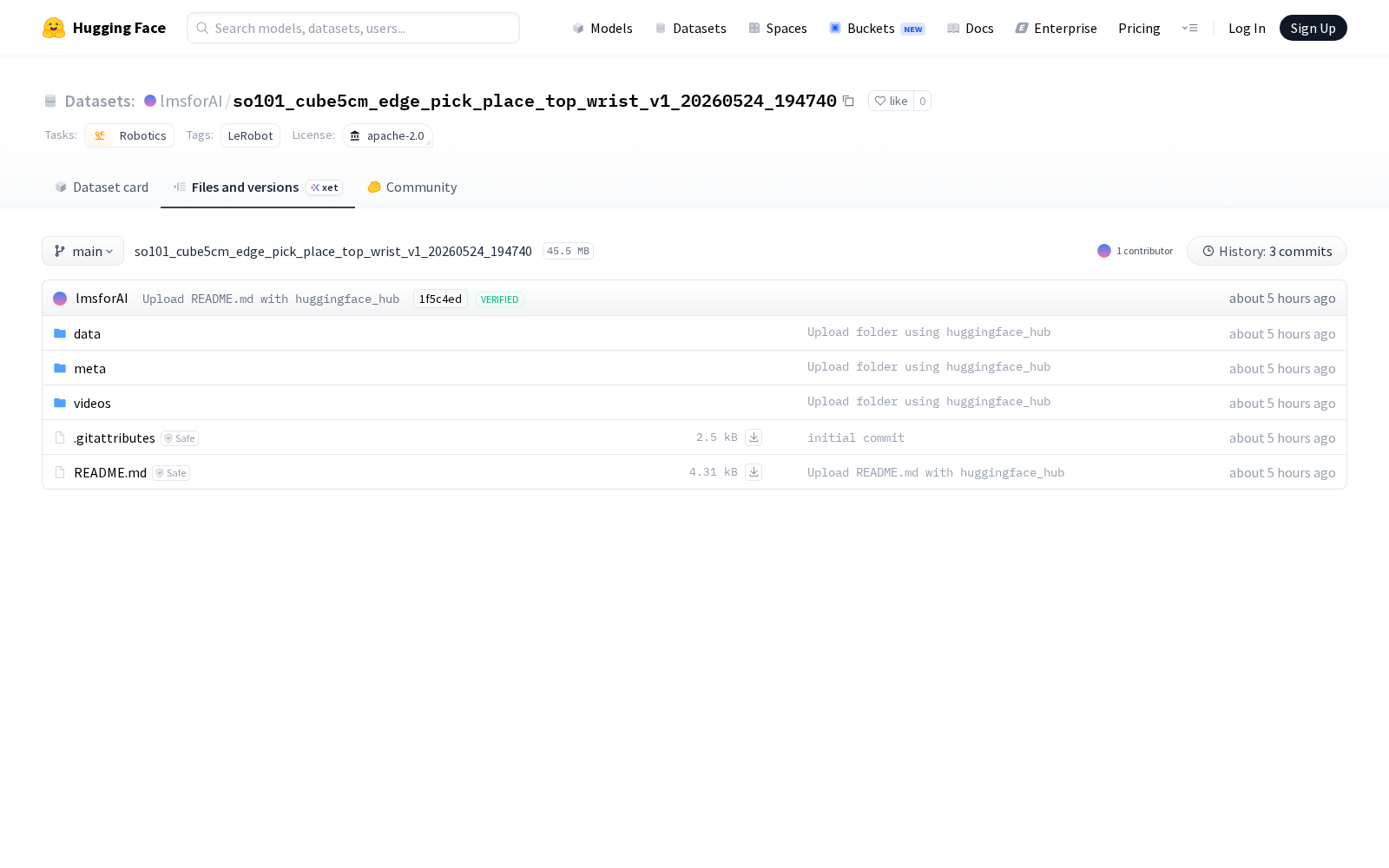
Files and versions内容:
从应用场景来看,该数据集可广泛应用于多个机器人研发方向:工业场景下可支撑3C电子零部件分拣、精密装配环节的机械臂抓取算法训练;服务场景下可为人形机器人的小件物品拾取、桌面整理等家居操作能力迭代提供训练素材;同时也可作为基准数据集用于视觉运动控制算法的泛化性、稳定性测试,帮助研发团队快速验证算法效果。
作为机器人训练数据领域的新增标准化供给,本次数据集的发布也具备明确的行业价值:一方面降低了中小研发团队的训练数据获取门槛,无需投入高额成本自行完成实体场景数据采集与格式适配即可开展相关算法研发;另一方面也进一步丰富了LeRobot生态的数据集品类,推动机器人训练数据的标准化进程,为不同团队研发的机器人AI模型的跨平台性能对比、能力迁移提供了统一的数据基础,对加快实体机器人的商业化落地进程形成了有效支撑。



_1769672084863.jpg)