

随着具身智能、工业自动化技术的快速落地,机器人对小尺寸规则物品的抓取、放置操作能力,已成为工业产线分拣组装、家用服务机器人桌面作业等场景的核心能力指标。而高质量、标准化的场景训练数据,是训练机器人操作策略、提升动作精度的核心基础。作为HuggingFace面向机器人学习领域推出的统一数据格式,LeRobot实现了不同机器人平台、不同研发团队之间的数据格式互通,大幅降低了训练数据的适配成本,是当前机器人学习领域应用最广的通用数据标准之一。
rishgang22本次发布的数据集single_lego_pick_place_20260524_182607,该数据集为HuggingFace LeRobot格式机器人数据集,于2026年5月24日首次对外发布。
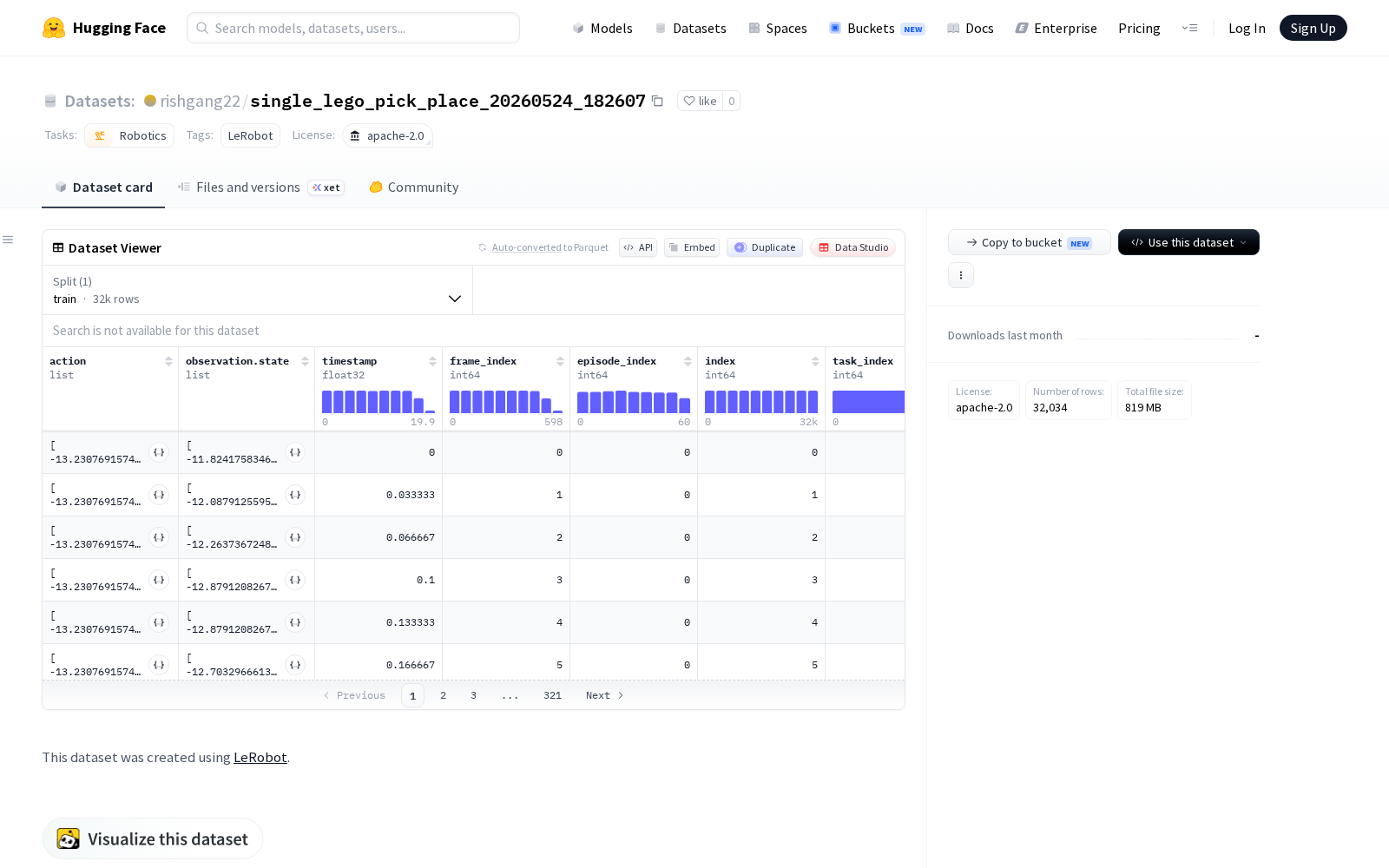
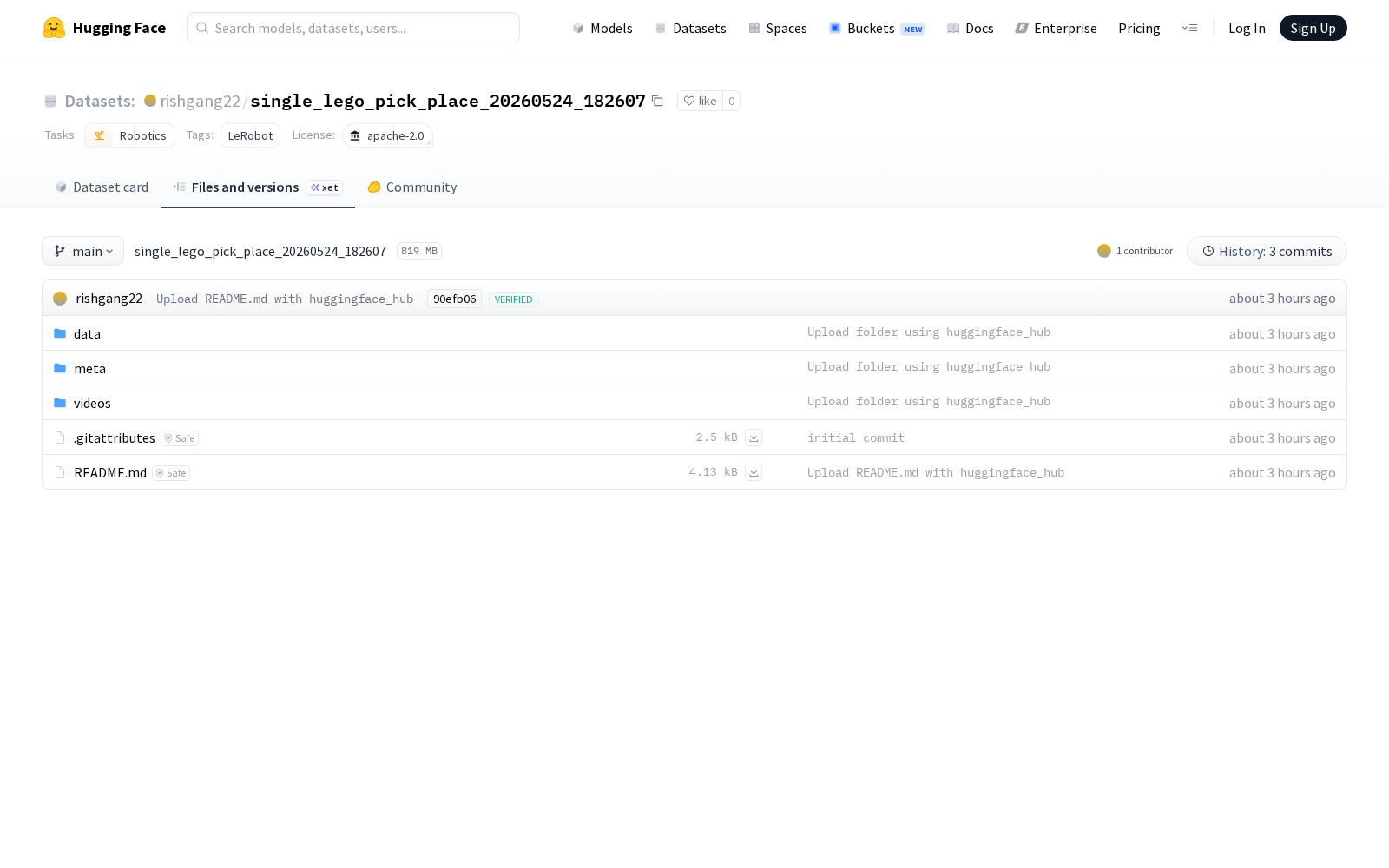
查看single_lego_pick_place_20260524_182607
Dataset card内容:
Files and versions内容:
从应用价值来看,该数据集聚焦单一乐高块的全流程抓取、放置操作场景,可覆盖多类机器人操作研发需求:在工业机器人领域,可用于3C电子零部件组装、小件物料分拣等场景的操作策略训练,帮助研发团队优化机器人的目标姿态识别、力控参数调整能力,缩短产线机器人的调试周期;在服务机器人领域,可作为桌面物品整理、小件物品取放等家用/商用服务场景的基础训练数据,提升机器人对小型规则物品的操作成功率;在具身智能研发领域,该数据集可作为通用验证数据集,用于多模态大模型与机器人执行端的动作对齐测试,降低具身智能研发的基础数据获取门槛。
当前我国数据要素市场正处于快速发展阶段,垂直领域的专用AI训练数据是数字经济核心供给的重要组成部分。此前面向机器人操作场景的训练数据普遍存在采集成本高、格式不统一、细分场景覆盖不足等问题,本次发布的数据集采用行业通用的LeRobot格式,不仅为下游研发团队提供了高质量的细分场景数据供给,也为机器人领域专用数据集的标准化发布提供了可参考的样本,对推动机器人操作技术的普惠化研发、加速实体场景的智能化落地有着积极的行业意义。



_1769672084863.jpg)