

当前,人形机器人、工业协作机器人正处于技术迭代与商业化落地的关键阶段,上半身操作能力是机器人完成工业装配、物流分拣、家庭服务、特殊场景作业等复杂任务的核心支撑,但面向上半身机器人的多模态训练数据长期存在供给不足、场景覆盖有限、模态匹配度低等痛点,成为制约操控算法研发效率的核心瓶颈之一。近日,人工智能研究机构gubam正式对外发布upper_body_w_hand-cls_4obj_task-v3.0专用数据集,该数据集于2026年5月24日率先上线全球开源AI社区HuggingFace,是国内为数不多专门针对上半身机器人操作任务打造的多模态数据集,将为机器人操作学习、多模态机器人控制领域的研发提供重要的数据支撑。
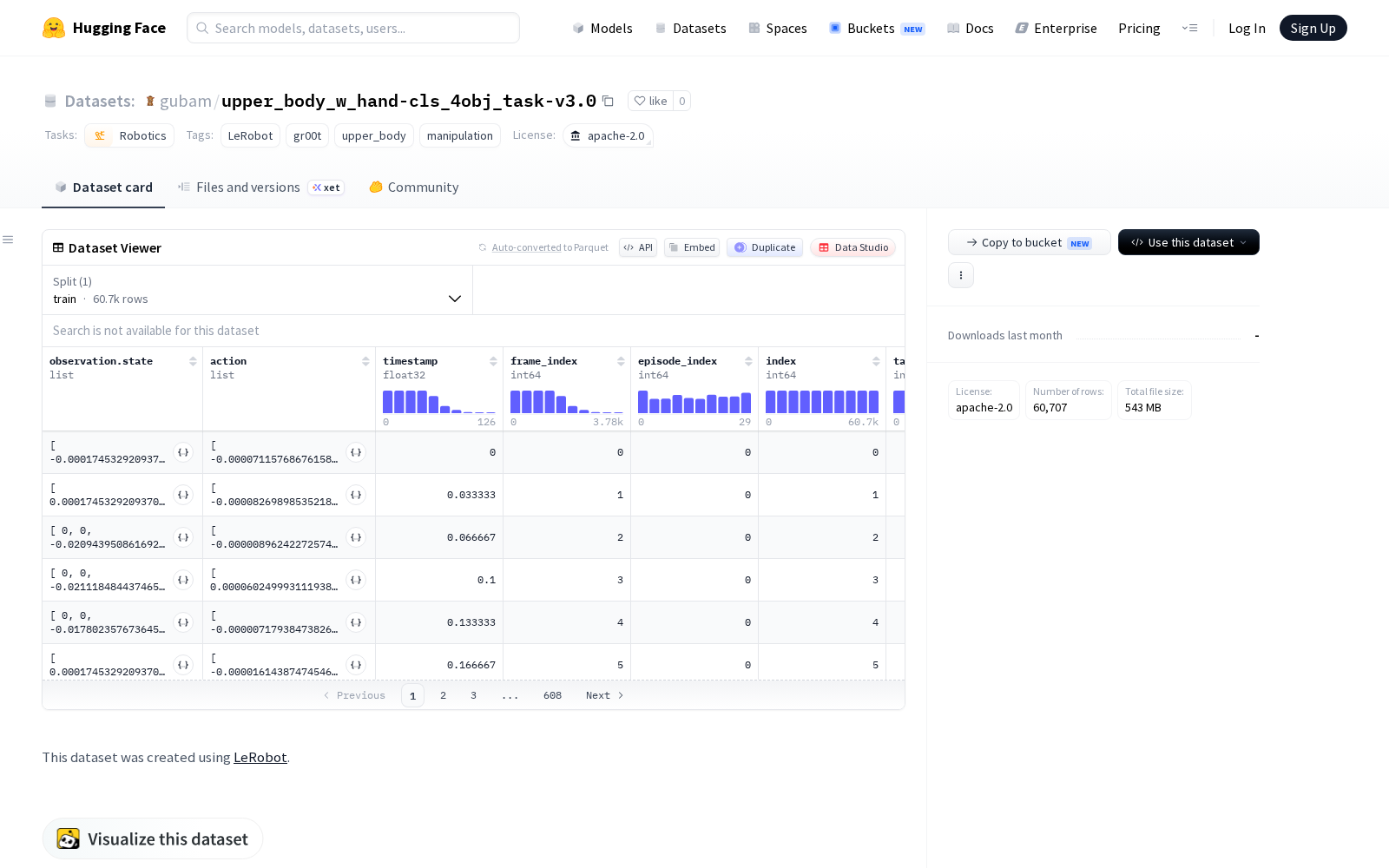
据公开信息显示,本次发布的数据集共包含30个典型操作任务片段,总计60707帧有效数据,帧率为30fps,能够完整覆盖上半身机器人常见操作场景的动作时序需求。数据采用“视觉+状态动作对”的多模态存储结构:其中视觉数据包含正面全局摄像头、左手腕摄像头、右手腕摄像头三个视角的视频内容,单帧分辨率为224x224,采用av1编码格式,在保证画面清晰度的前提下大幅降低了存储体积,方便研究人员快速调用;状态观测数据与动作数据均采用60维浮点数向量格式,完整覆盖上半身机器人从躯干到双臂、双手的所有关节参数,可精准映射机器人实时运行状态与控制指令,有效降低算法从仿真环境到实机部署的适配成本。此外,数据集还配套了时间戳、帧索引、片段索引、任务索引等完整元数据,支持研究人员按需拆分数据集,实现定向的算法训练与效果验证。
本次发布的数据集采用商业友好的Apache 2.0许可证开放,学术机构、企业研发团队均可免费使用,甚至可用于商业化产品的研发。从应用场景来看,该数据集可支撑多类机器人研发需求:在工业协作机器人领域,可用于训练机器人完成精密电子装配、危险物料分拣、生产设备运维等操作任务,提升机器人在复杂工业场景下的自适应能力;在服务机器人领域,可支撑家用服务机器人、养老陪护机器人完成物品递送、家电操作、辅助进食等上半身交互任务,优化机器人动作的流畅度与操作准确率;在通用人形机器人研发领域,多模态匹配的数据可帮助算法模型同时理解环境视觉信息与自身运行状态,实现端到端的多模态控制,加快人形机器人通用操作能力的迭代效率。
业内分析指出,该数据集的发布进一步填补了上半身机器人专用多模态操作数据集的供给缺口,为全球机器人操控算法的研发提供了标准化的训练与评估基准,有助于降低行业研发门槛,加快机器人操作技术从实验室走向商业化落地的进程,对推动整个机器人产业的数字化、智能化发展具有重要的支撑意义。
查看upper_body_w_hand-cls_4obj_task-v3.0完整数据集
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)