

当前,随着工业制造智能化转型加速、人形机器人商业化进程提速,机器人的精细操作能力已成为制约其落地场景拓展的核心瓶颈。模仿学习作为当前机器人快速习得复杂操作技能的主流技术路径,对场景化、高标注质量的真实训练数据集需求持续攀升,但公开领域面向细分工业操作场景的专用数据集供给长期不足,成为相关研发的共性障碍。
近日,DAVIAN-Robotics正式发布peg_in_hole机器人操作专用数据集,该数据集于2026年5月24日率先上线全球最大的AI开源社区HuggingFace,定向服务于机器人精细操作、模仿学习两大核心研究领域。
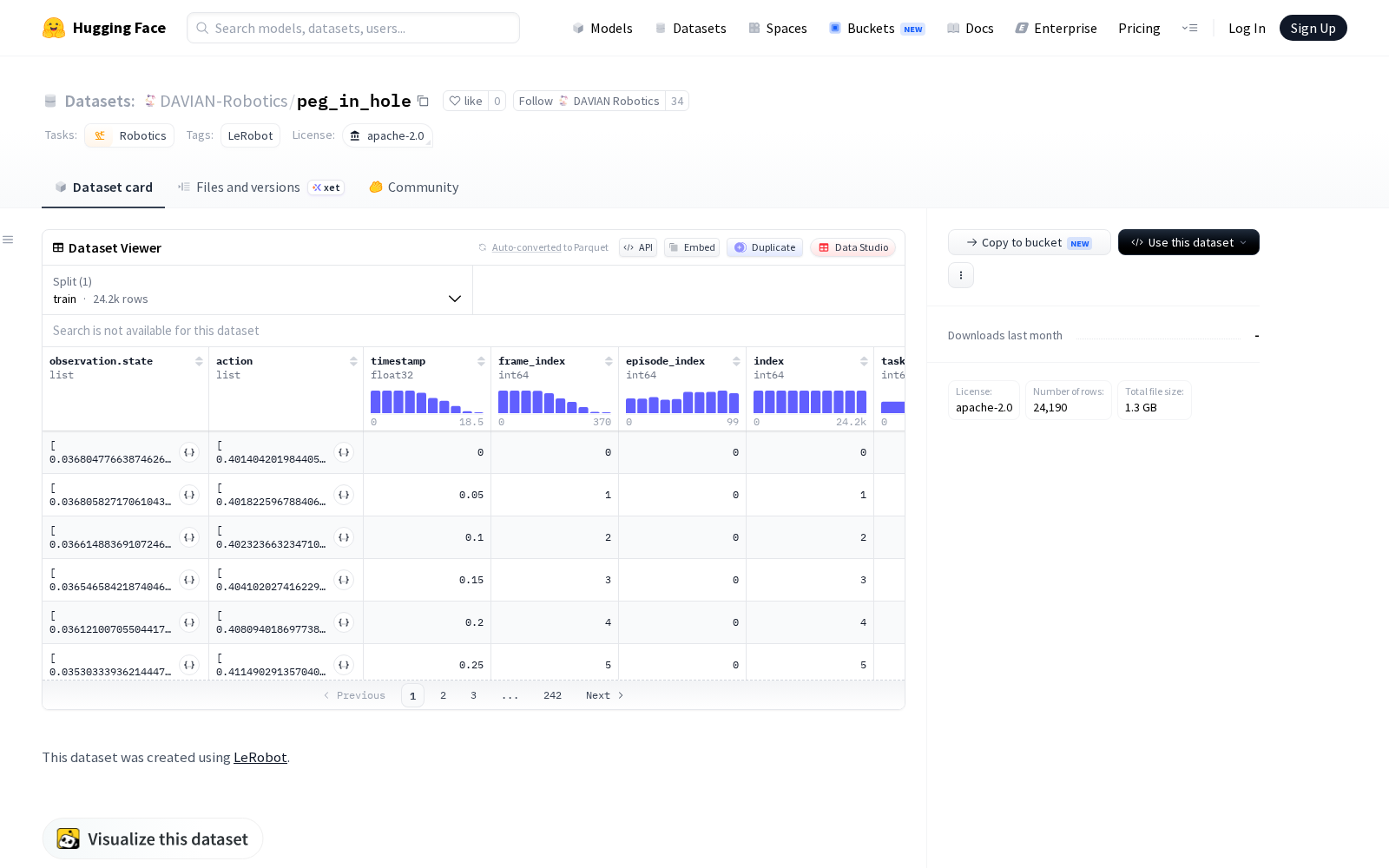
据介绍,本次发布的peg_in_hole数据集聚焦工业场景中最常见的插孔(peg_in_hole)操作任务,采用LeRobot工具完成数据集构建,全部数据基于Franka机器人平台真实采集完成,共包含100个完整操作序列(episodes),总帧数达24190帧,采集帧率为20fps。数据集维度覆盖机器人全状态数据与多视角视觉数据:既包含关节位置、运行速度、末端执行器位置与姿态、夹爪开合状态等机器人本体运行数据,也包含末端执行器控制指令、夹爪控制信号等动作标注数据,同时同步采集了手腕视角、左后视角、右后视角三个维度的实时视频图像,能够完整还原精细插孔操作的全流程状态与环境信息。存储层面,结构化数据采用parquet格式存储,数据文件总大小为100MB,配套视频文件总大小为200MB,轻量化的存储设计大幅降低了下载与使用门槛,可直接适配主流机器人学习与控制研究框架。
从应用场景来看,peg_in_hole(插孔)是3C电子组装、汽车零部件装配、新能源电池生产等工业场景的高频操作环节,对操作精度、力控稳定性要求极高,是当前工业机器人替代人工的核心难点场景。本次发布的真实场景采集数据集,可广泛应用于多个方向:其一,用于工业机器人插孔操作的模仿学习训练,减少仿真数据与真实场景的域偏移问题,缩短算法在实际产线的适配周期,降低企业自研训练数据的采集成本;其二,作为精细操作算法的通用测试基准,为不同控制算法、学习模型的精度、鲁棒性、泛化能力对比提供统一的验证标准;其三,也可拓展用于人形机器人家用、商用场景的精细操作技能预训练,支撑家电装配、工具使用等场景的算法研发。
该数据集的发布,填补了公开领域面向插孔类精细操作场景的高质量标注数据集空白,进一步丰富了机器人学习领域的开源数据供给,能够降低中小研发团队、高校研究机构的相关研究准入门槛,推动机器人精细操作技术的快速迭代,也为数据要素赋能人工智能与机器人技术交叉领域创新提供了典型样本。
Dataset card内容:
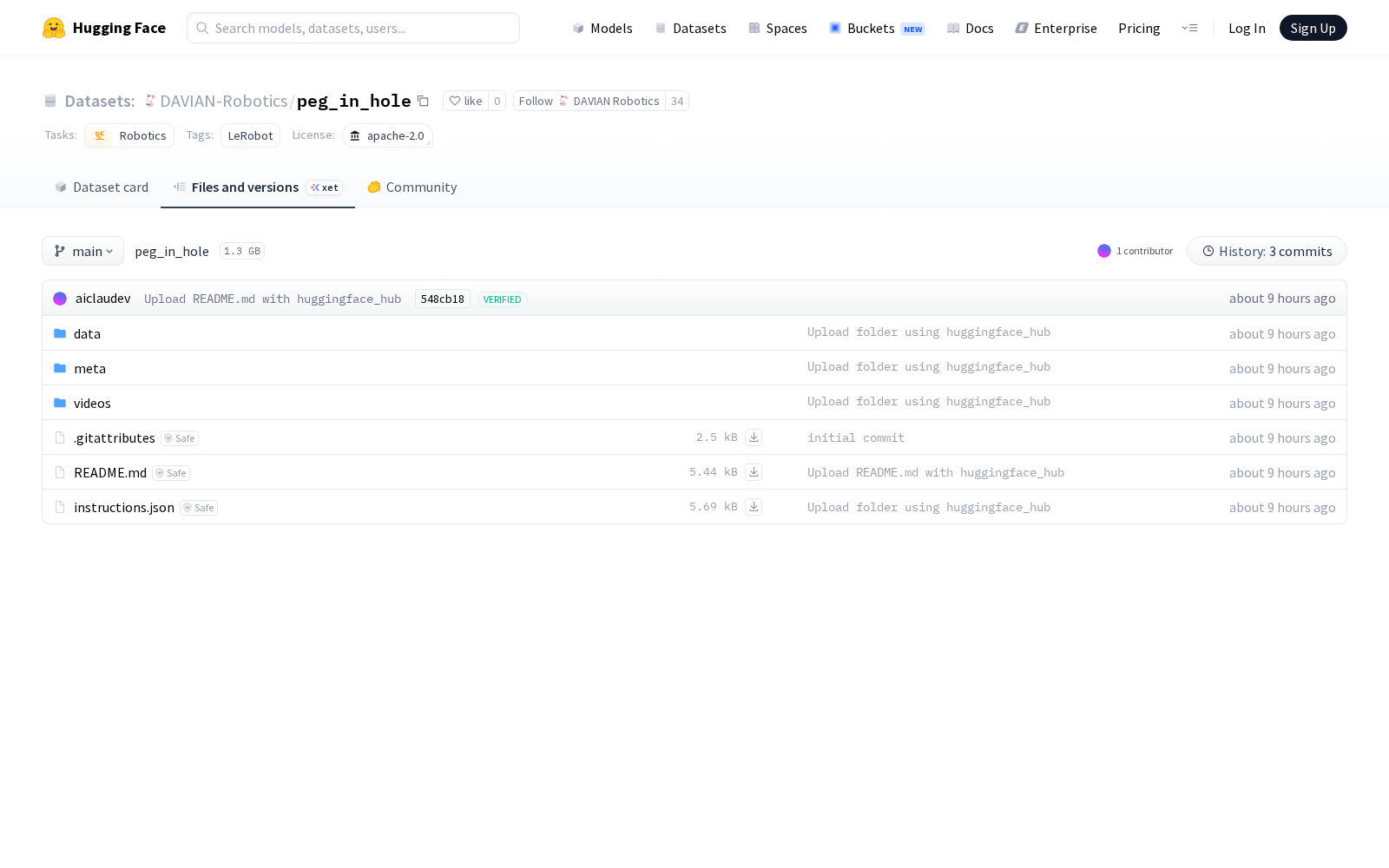
Files and versions内容:



_1769672084863.jpg)