

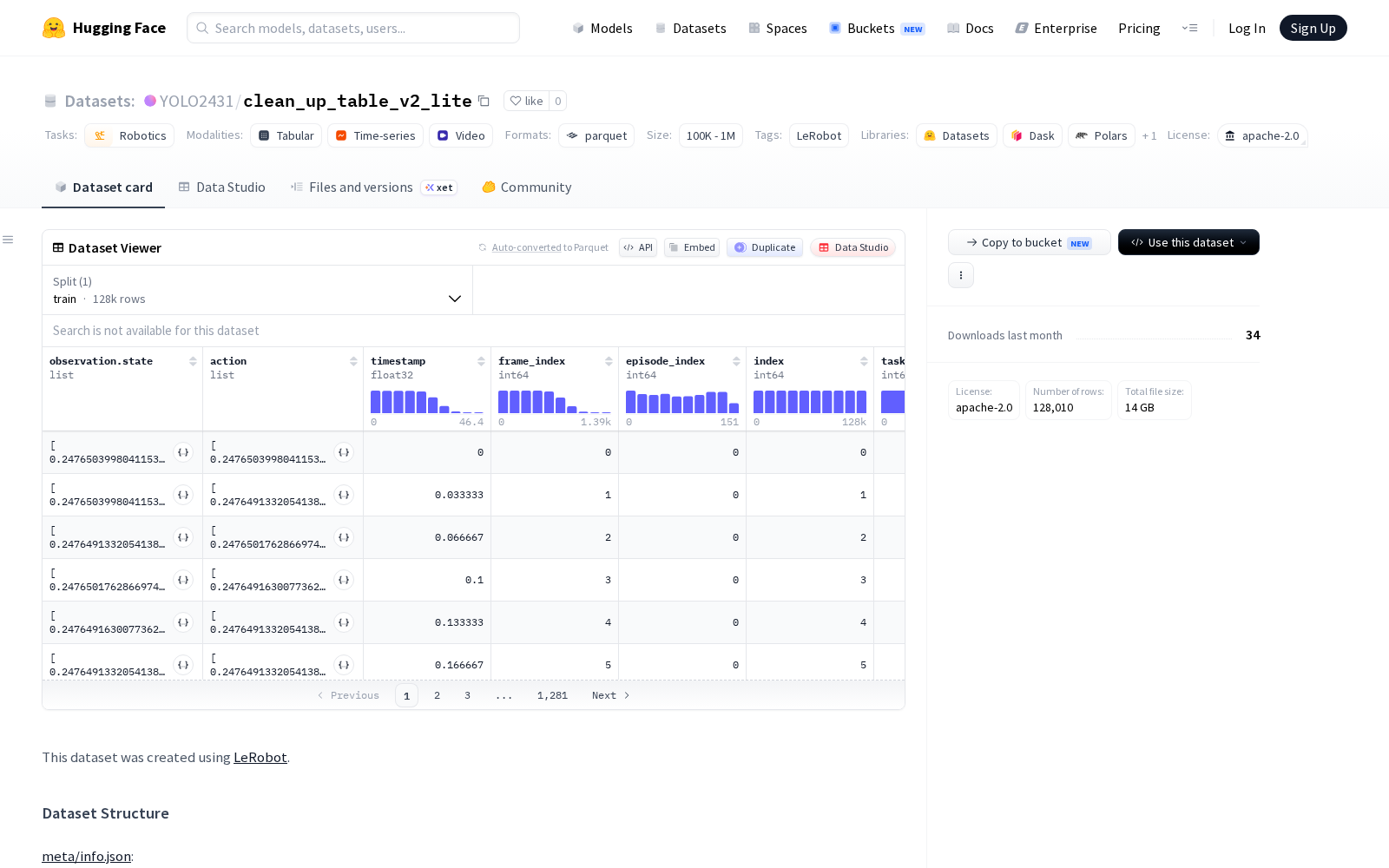
YOLO2431本次发布的数据集clean_up_table_v2_lite,该数据集由LeRobot创建,是一个用于机器人学研究的机器人操作数据集。它包含152个总片段、128010个总帧和456个总视频,涵盖6个不同任务。数据集结构丰富,包括观察状态(32维浮点数组,编码左右机械臂的3D位置、旋转6D表示、夹持器状态和关节角度)、动作(相同维度)、来自头部摄像头和左右手腕摄像头的视频观察(3通道、360x640分辨率、30fps H.264编码视频),以及时间戳、帧索引、片段索引和任务索引等元数据。数据集以Parquet格式存储,适用于机器人控制、模仿学习或强化学习任务,使用Apache 2.0许可证。
Dataset card内容:
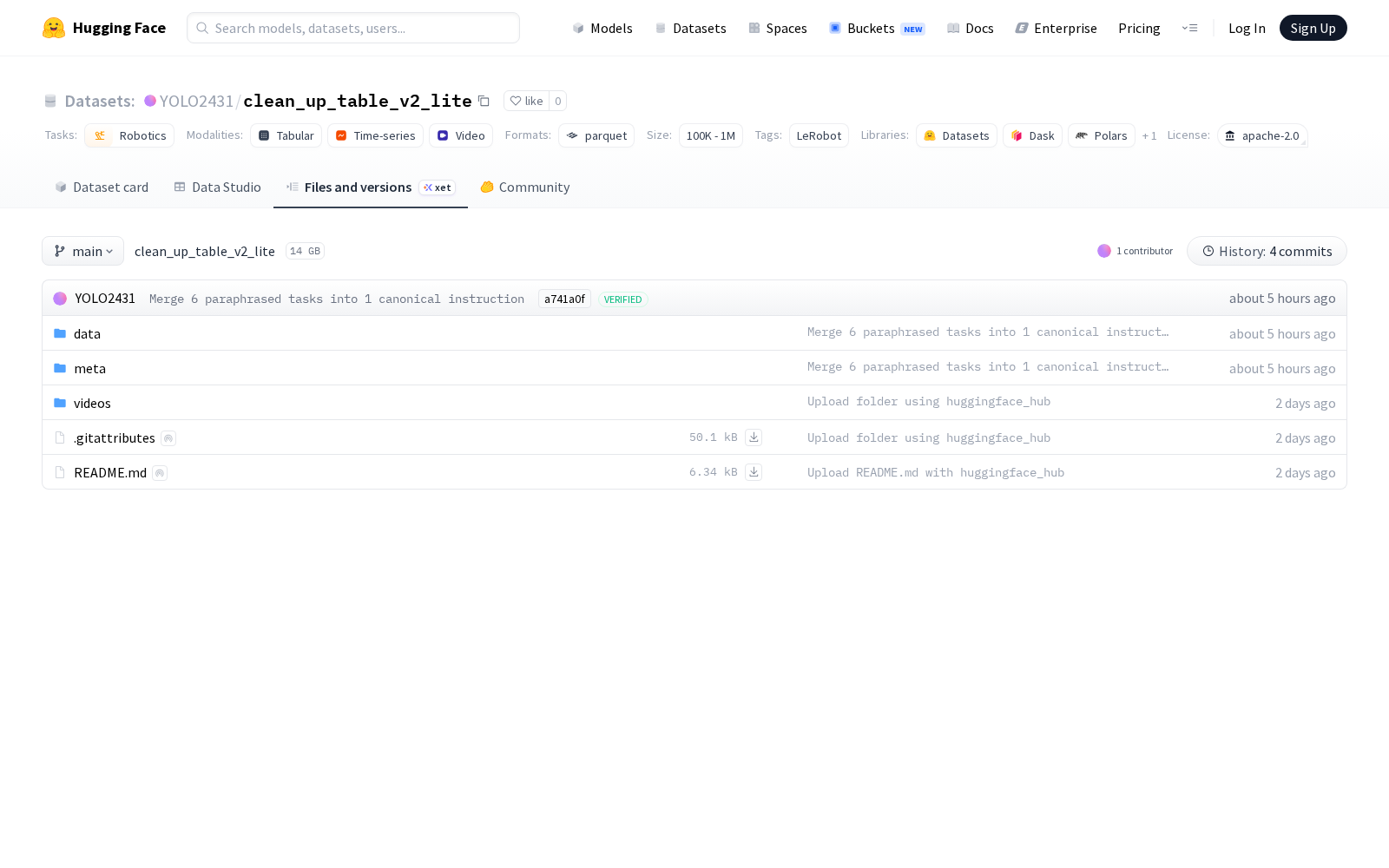
Files and versions内容:



_1769672084863.jpg)