

近年来,随着协作机器人、服务机器人产业的快速落地,实体AI研发对细分场景的结构化、多模态训练数据的需求持续攀升。区别于通用AI的纯文本、图像数据,机器人操作数据集需要同时覆盖本体运动参数、环境感知信息、任务执行全流程记录,采集门槛更高、行业缺口更为突出。
近日,机器人领域技术方nodogoro正式发布双机械臂杂货打包场景专用数据集cell1_20260523_mohammed_groceries_packing_20260523_212909,该数据集是机器人学方向的垂直场景数据集,采用业内通用的LeRobot工具创建,专门适配starpilot_yam_gripper类型双机械臂的操作任务训练需求。
本次发布的数据集共包含5个完整的操作情节(episodes),按30帧每秒的速率采集,总计覆盖3527帧有效数据,全量对应杂货打包单一场景的完整操作流程。数据集结构实现了多模态数据的全维度覆盖:既包含动作层数据,如实记录机械臂的位置、旋转角度、夹爪宽度等操作参数;也包含本体状态层数据,覆盖编码器角度、IMU传感器数据、机械臂姿态信息等运行状态;同时还搭载多视角视觉感知数据,由左腕、右腕、基座三个位置的摄像头同步采集,同时提供RGB彩色图像与深度图像数据,完整还原操作过程中的环境信息。数据主体采用高效的Parquet文件格式存储,配套视频文件采用MP4格式存储,其中数据集文件大小为100MB,配套视频文件大小为200MB。
从应用方向来看,该数据集可广泛应用于机器人控制、计算机视觉、机器学习等多个研究领域,尤其适配双机械臂系统的任务学习与模拟训练需求:一方面可支撑双机械臂协同操作算法的研发,为杂货分拣、装袋、码放等典型民用服务场景的动作规划模型提供训练素材;另一方面可用于多模态机器人学习模型的训练,结合视觉感知数据与本体传感数据,提升机器人对未知物品、非标准化场景的泛化操作能力;此外还可对接数字孪生仿真系统,将真实场景采集的操作数据导入仿真环境,降低实体机器人的测试成本,加快算法迭代效率。
作为垂直场景的专用机器人数据集,本次发布的产品填补了民用服务场景双机械臂操作数据的部分供给空白,为中小研发团队降低了原始数据采集的门槛,对于推动实体AI技术落地、完善机器人领域数据要素供给体系具有积极意义。
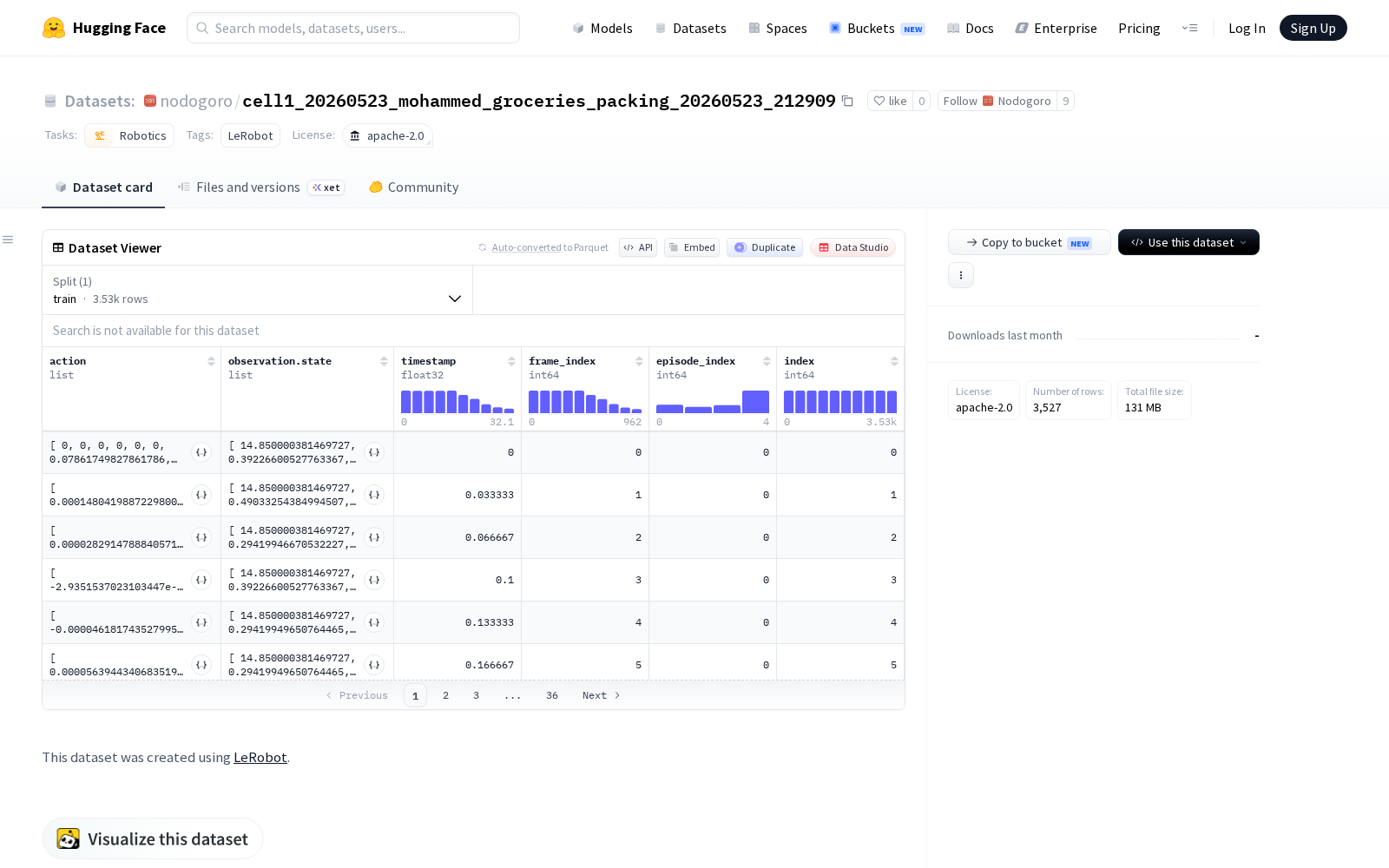
查看cell1_20260523_mohammed_groceries_packing_20260523_212909
Dataset card内容:
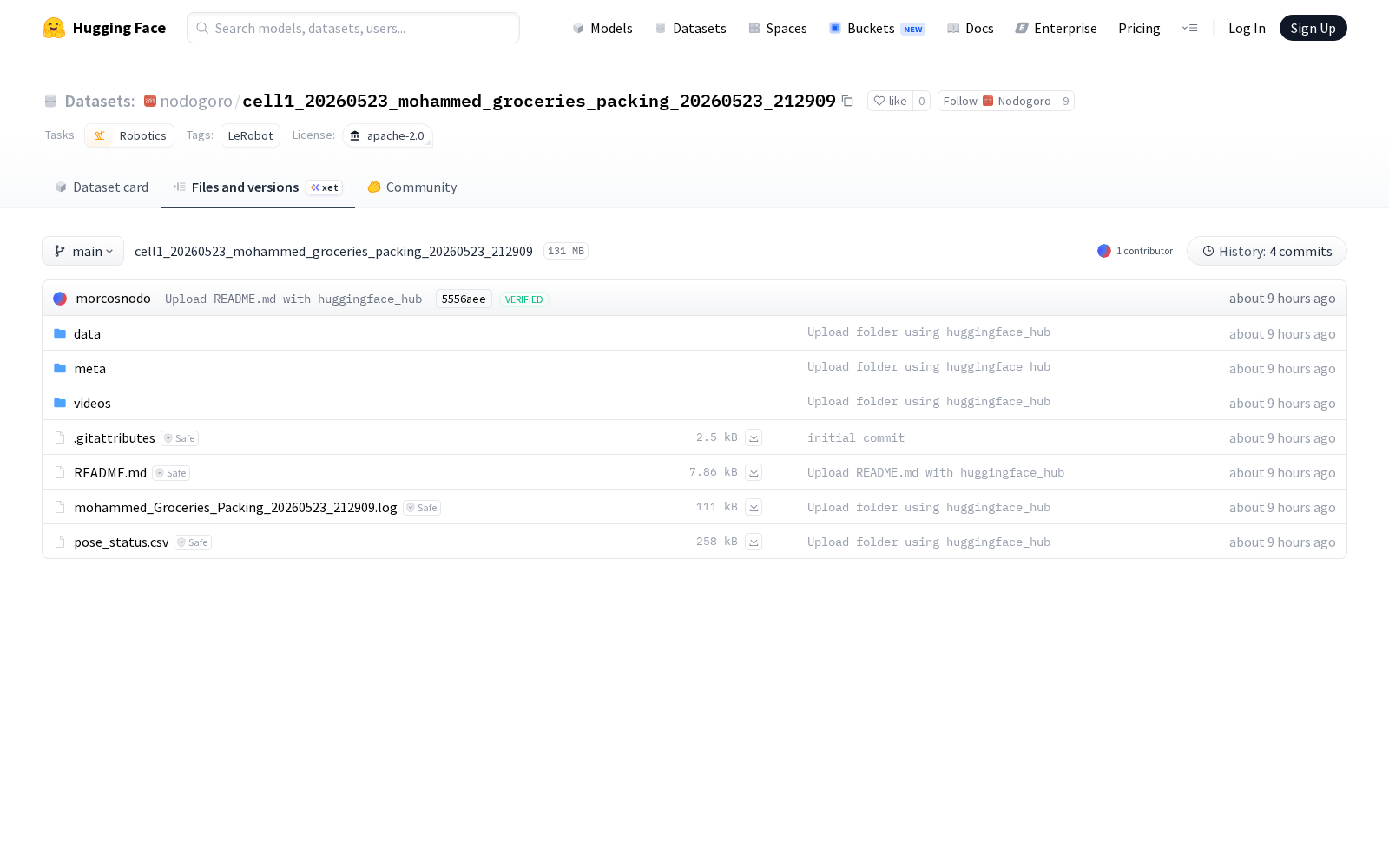
Files and versions内容:



_1769672084863.jpg)