

近年来,随着协作机器人、人形机器人商业化进程持续加速,基于仿真环境的强化学习训练已成为降低机器人研发成本、缩短算法迭代周期的核心路径,而覆盖多任务、多动作维度的高质量标注数据集,是支撑机器人自主决策算法落地的关键底层基础设施。近日,开发者serdarbahar正式对外发布task_exp_simulation_dual_6机器人任务实验数据集,该数据集于2026年5月24日首发于全球最大的AI模型与数据集社区HuggingFace,面向全行业开放使用。
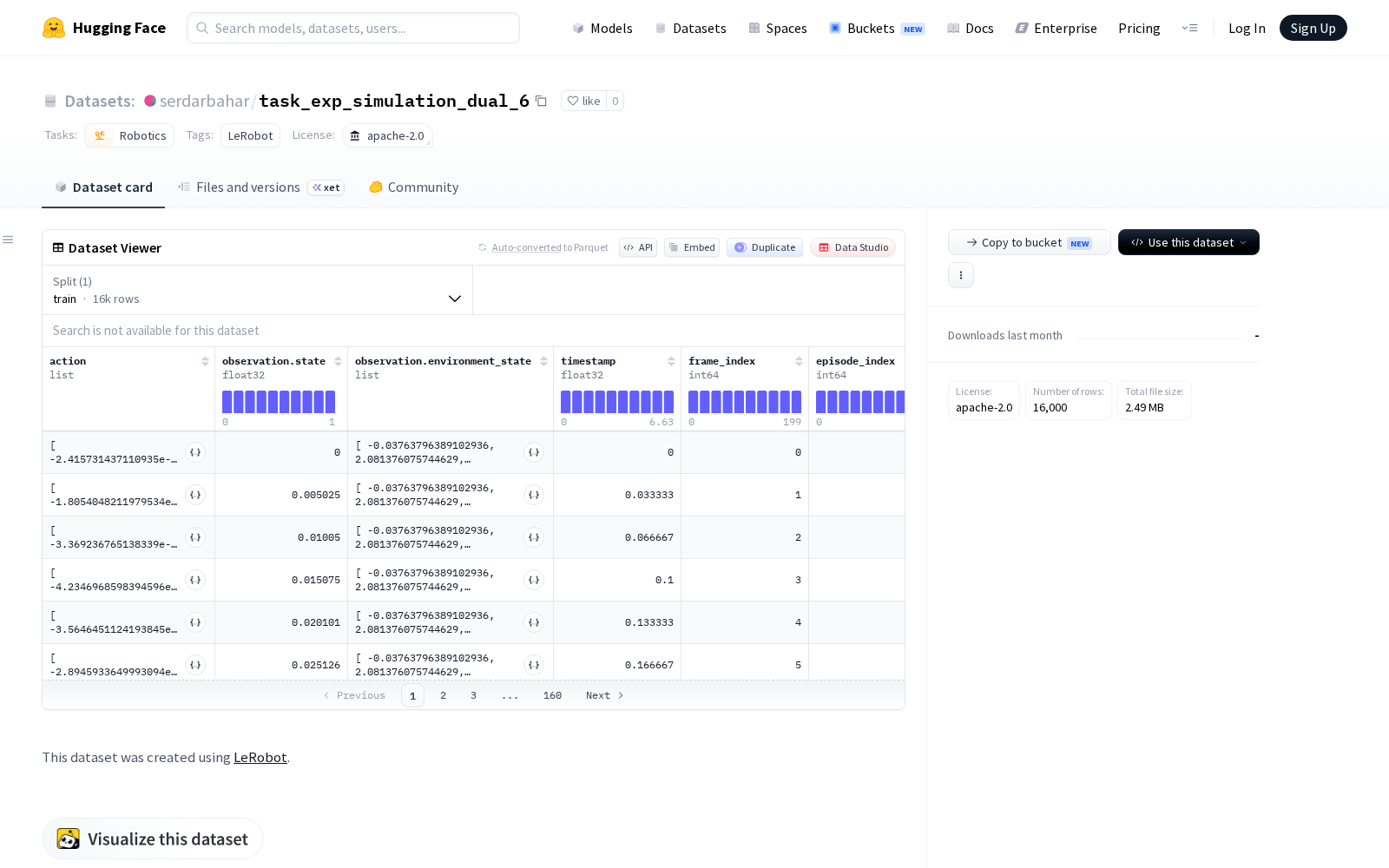
作为专门针对xArm7七轴协作机器人操作场景构建的仿真数据集,task_exp_simulation_dual_6基于HuggingFace旗下开源机器人研发框架LeRobot搭建,底层数据采用parquet格式分块存储,兼顾了大数据量下的读写效率与跨平台兼容性。全量数据集包含80个训练子集,总帧数达16000帧,采样帧率为30fps,可完整还原机器人操作任务的时序动态过程。
从数据标注维度来看,该数据集覆盖了机器人运行全链路的核心参数:动作维度同时包含正向、逆向的关节1-7控制参数与夹爪控制参数,可满足不同路径规划算法的训练需求;观测维度包含任务进度标签、76维环境状态参数(涵盖机器人空间位置、降维处理后的视觉图像特征等),搭配时间戳、帧索引、集索引、任务索引等结构化字段,实现了机器人动作与环境反馈的全链路可追溯,大幅降低了研发团队的数据预处理成本。
目前该数据集已开放下载,遵循Apache 2.0开源许可协议,商用无限制,可支撑多个研发场景的需求:在机器人控制领域,可用于七轴协作机器人的路径规划算法训练、力控算法仿真验证,降低实体机器人测试的硬件损耗与时间成本;在强化学习领域,可用于多任务机器人的通用策略训练、模拟到现实(Sim2Real)迁移算法研发,为工业分拣、柔性装配、服务机器人操作等场景的算法落地提供基础训练素材。
当前全球机器人产业正处于从“预编程执行”向“自主决策”升级的关键阶段,高质量仿真数据集的开放,有助于降低中小研发团队的准入门槛,推动机器人控制算法的开源协作,加速通用机器人技术的落地进程。
Dataset card内容:
Files and versions内容:



_1769672084863.jpg)