

当前,机器人自主操作技术的商用落地已进入深水区,尤其是面向餐饮、零售、工业分拣等场景的细粒度物体分发、视觉引导操作任务,对算法的泛化性、鲁棒性提出了极高要求。而高质量、标准化的真实机器人交互数据集,是支撑算法训练、效果验证的核心基础设施,LeRobot作为机器人学习领域广泛采用的标准化数据集格式,凭借统一的结构规范、多模态数据兼容能力,大幅降低了跨团队、跨框架的研发协作成本,已成为全球机器人研发领域的主流数据标准之一。
近日,CoRL2026(国际机器人学习大会2026年度会议)CSI工作组正式发布UR7e_CaP_DistributeChocopie_100epi数据集,该数据集于2026年5月24日首发上线HuggingFace平台,面向全球机器人领域研发人员开放获取。
据介绍,该数据集是基于UR7e协作机器人采集的真实场景LeRobot格式数据集,专门面向巧克力派分发的典型CaP任务构建,所有数据均从经视觉判定为成功的真实试验中筛选,共包含100个完整的前推episode序列。数据集覆盖多模态同步采集的全链路观测数据:包括RealSense顶部视角摄像头、机器人手腕摄像头的同步视频流,机器人实时运行状态参数,以及控制器输出的期望动作指令,所有数据的采样帧率统一为10FPS,时序对齐精度高,可直接用于相关算法的训练与测试。
从应用价值来看,该数据集可覆盖多个研发场景的需求:一是可用于视觉引导机器人操作算法的训练与验证,尤其是小体积、柔性易损物体的分拣、摆放任务的算法优化,相关技术可迁移至食品加工、餐饮服务场景的自动配餐、餐品分发设备研发;二是可用于多视角视觉感知与机器人动作联动模型的训练,为工业柔性分拣、仓储拆零拣选场景的算法研发提供真实场景测试基准;三是基于标准化LeRobot格式,该数据集可直接对接主流机器人学习框架,大幅降低研发人员的数据预处理成本,提升算法迭代效率。
此次数据集的发布,也填补了面向轻量餐饮分发场景的UR系列协作机器人真实操作数据集的空白,为全球机器人领域的学术研究、产业落地提供了标准化的基准数据支撑,对于推动机器人操作算法从仿真环境向真实场景迁移、降低服务机器人商用落地的研发门槛具有重要意义。
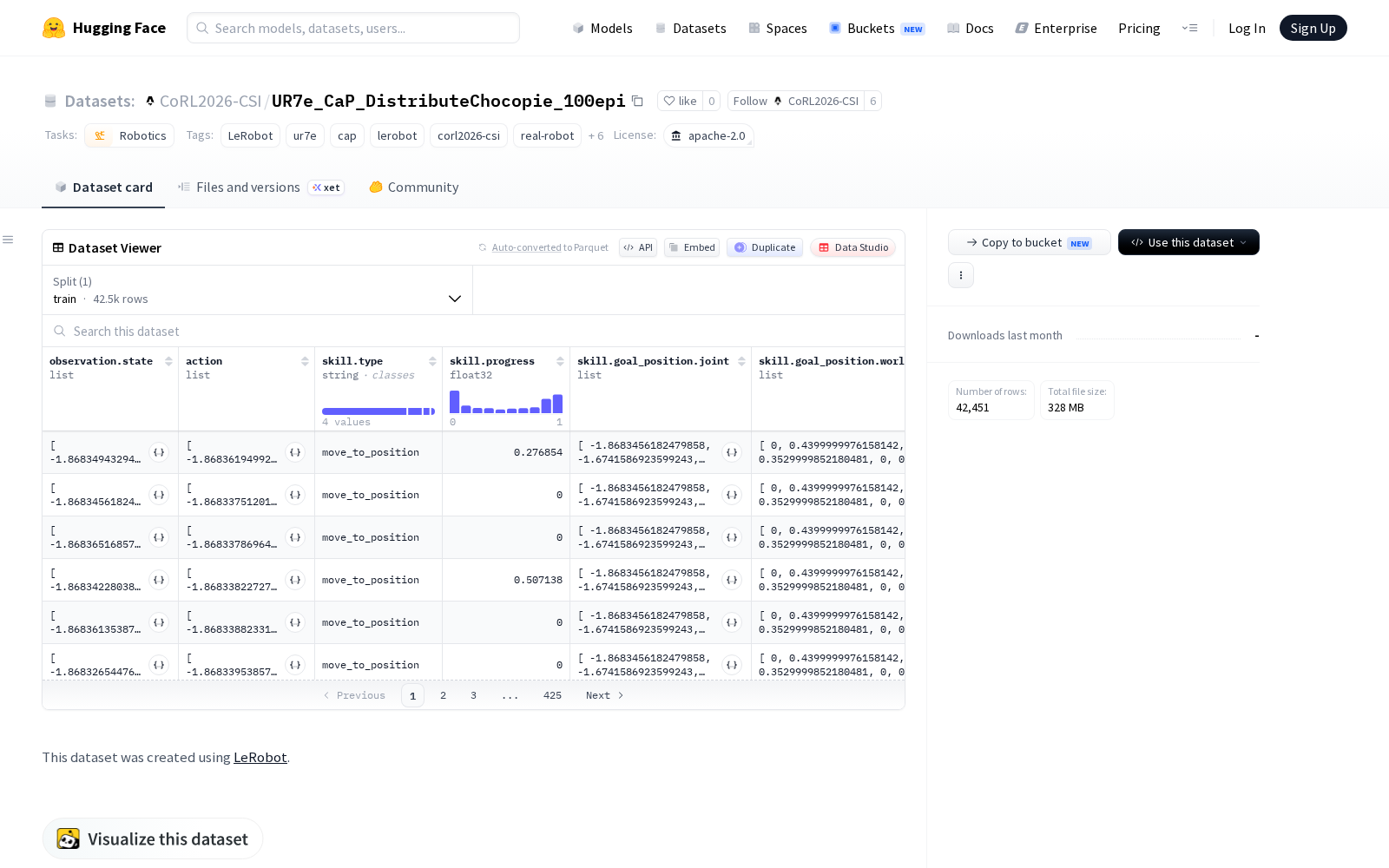
查看UR7e_CaP_DistributeChocopie_100epi
Dataset card内容:
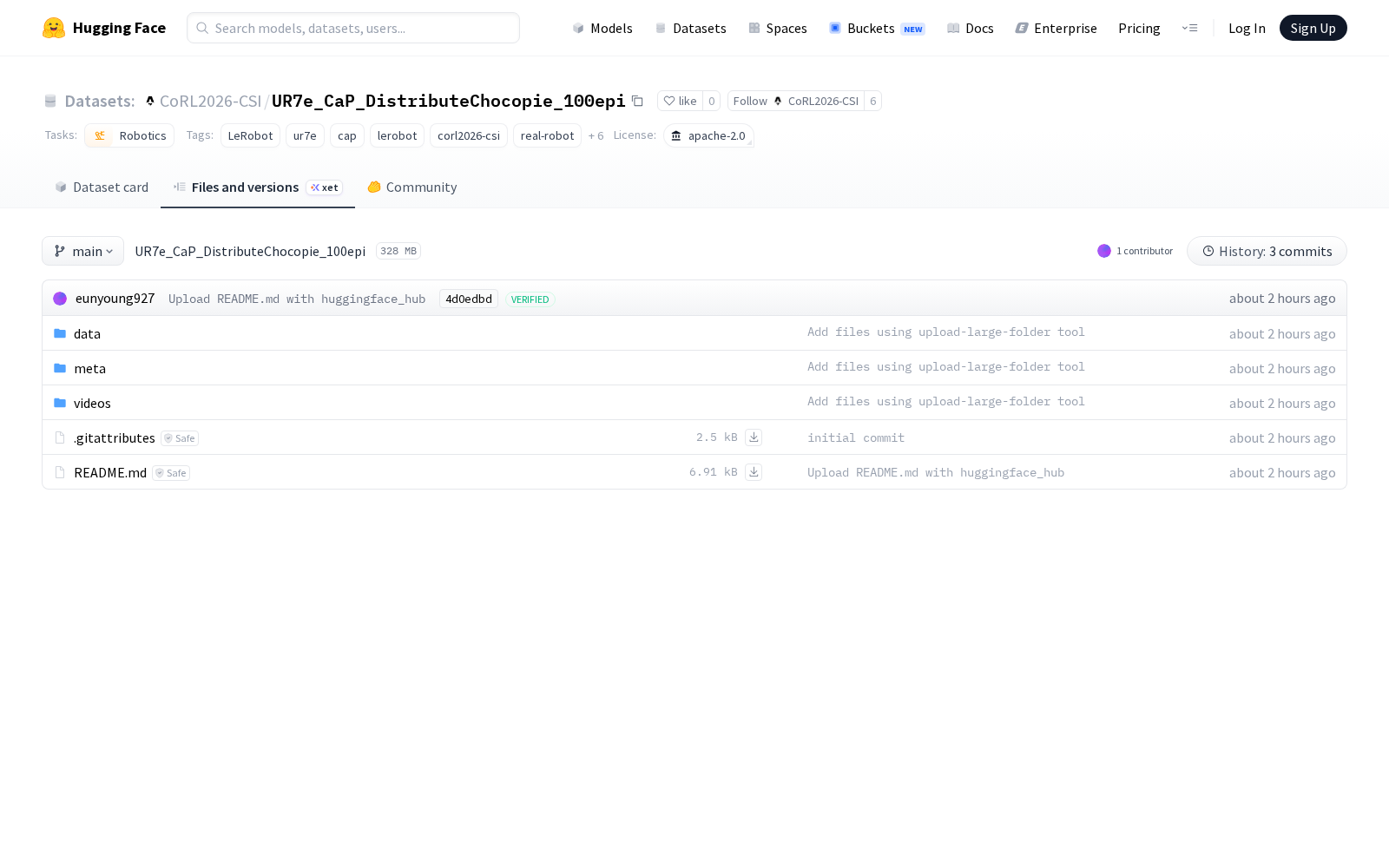
Files and versions内容:



_1769672084863.jpg)